







RandLA-Net 细节介绍(代码)
- RandLA-Net 亮点1------基于概率的训练样本选取和随机下采样:
https://blog.youkuaiyun.com/qq_24505417/article/details/108977386
- RandLA-Net 亮点2------local feature aggregation:
https://blog.youkuaiyun.com/qq_24505417/article/details/108982154
- RandLA-Net Decoder:
https://blog.youkuaiyun.com/qq_24505417/article/details/108988259
训练参数
显卡: NVIDA TITAN Xp
训练次数: 100个epoch, 每个epoch 500 steps, batch_size ==4
learning_rate: 1e-2
optimizer: Adam
训练时间: 8h
1. 下载数据并放置在合适位置
使用sh utils/download_semantic3d.sh 下载 或者去官网下载.
下载的原始数据放置在data/semantic3d/original_data文件夹下
2. 数据预处理
python utils/data_prepare_semantic3d.py
这一步是对原始点云数据进行网格采样, 包含0.01 和0.06 两次, 最终用于训练的数据是0.06采样后的点云.
3. 训练
python main_Semantic3D.py --mode train --gpu 0
训练结果:
只有下一个epoch的训练结果(Mean IoU)好于当前epoch,才会保存模型训练结果. 最后一个epoch的模型并不一定是最优模型.
训练保存的模型文件在results里面
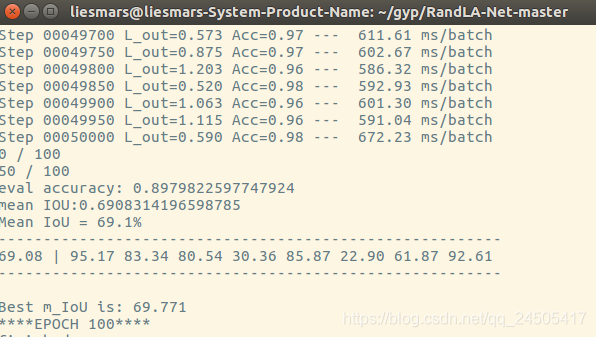
38501/500 ~= 77 (epoch 从0开始计数,也就是epoch==76时)
最优epoch所对应的训练日志:
****EPOCH 76****
Step 00038050 L_out=1.568 Acc=0.95 --- 603.29 ms/batch
Step 00038100 L_out=1.141 Acc=0.95 --- 591.83 ms/batch
Step 00038150 L_out=0.868 Acc=0.96 --- 582.45 ms/batch
Step 00038200 L_out=0.822 Acc=0.96 --- 594.24 ms/batch
Step 00038250 L_out=0.673 Acc=0.95 --- 591.06 ms/batch
Step 00038300 L_out=1.119 Acc=0.97 --- 595.11 ms/batch
Step 00038350 L_out=1.058 Acc=0.96 --- 601.45 ms/batch
Step 00038400 L_out=1.346 Acc=0.96 --- 615.70 ms/batch
Step 00038450 L_out=0.771 Acc=0.97 --- 597.55 ms/batch
Step 00038500 L_out=0.634 Acc=0.94 --- 706.30 ms/batch
eval accuracy: 0.9015642582695459
mean IOU:0.697714954433361
Mean IoU = 69.8%
--------------------------------------------------------
69.77 | 95.32 84.13 82.35 32.68 85.45 24.94 61.43 91.88
--------------------------------------------------------
Best m_IoU is: 69.771
4. 测试:
python main_Semantic3D.py --mode test --gpu 0
测试标签文件:
效果展示(reduce-8):
展示动画:https://www.bilibili.com/video/av328567728/)
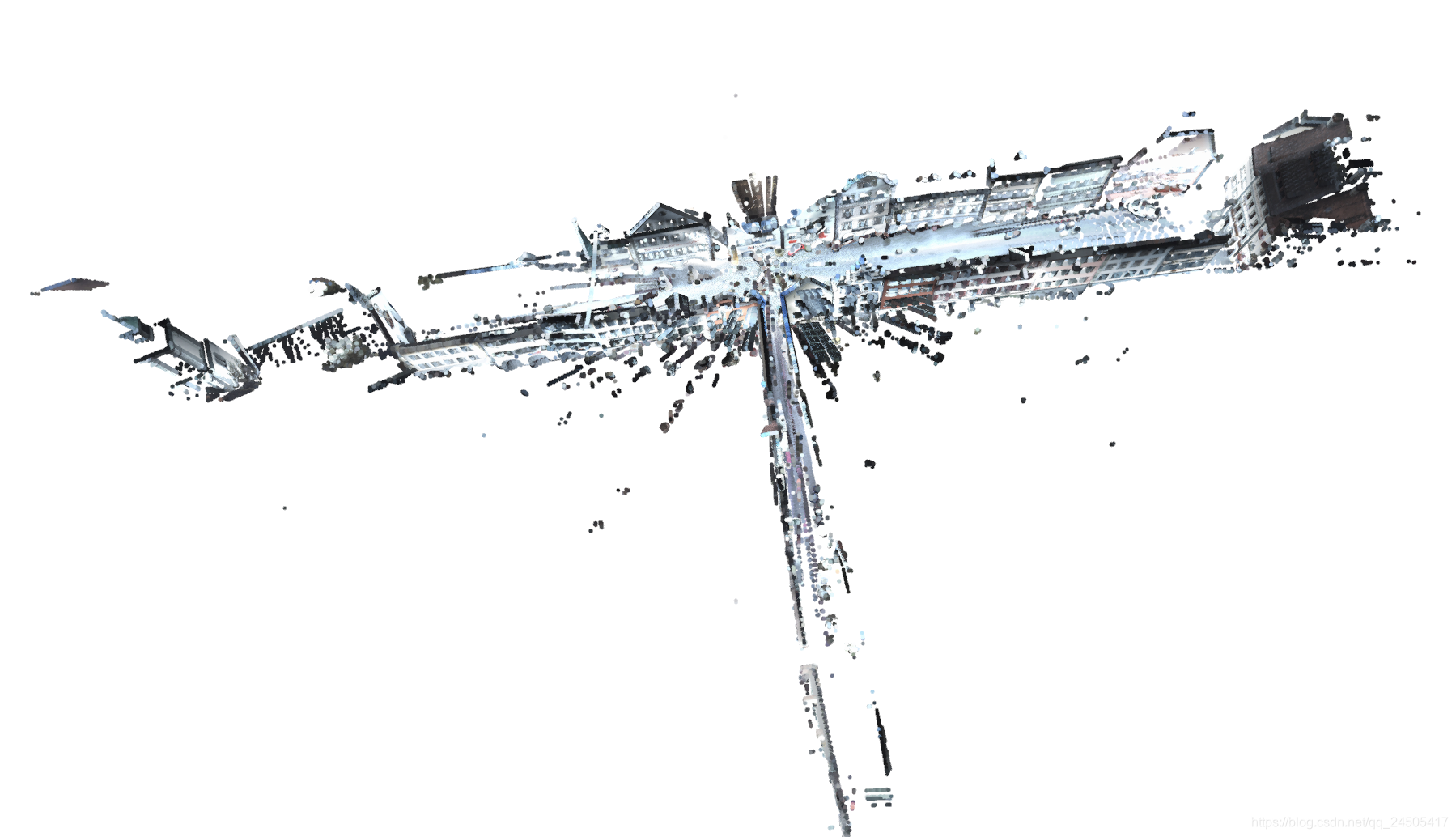
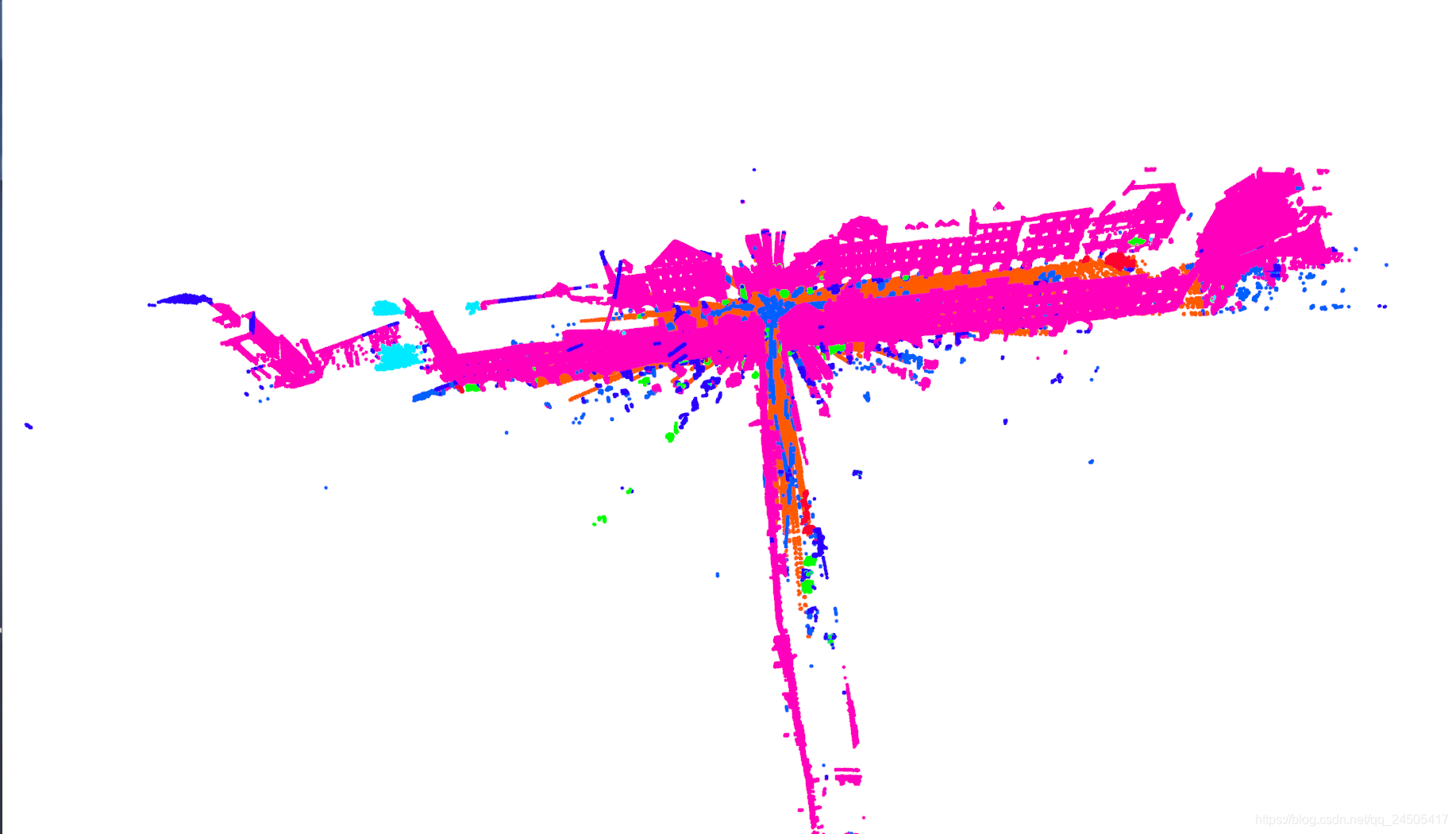
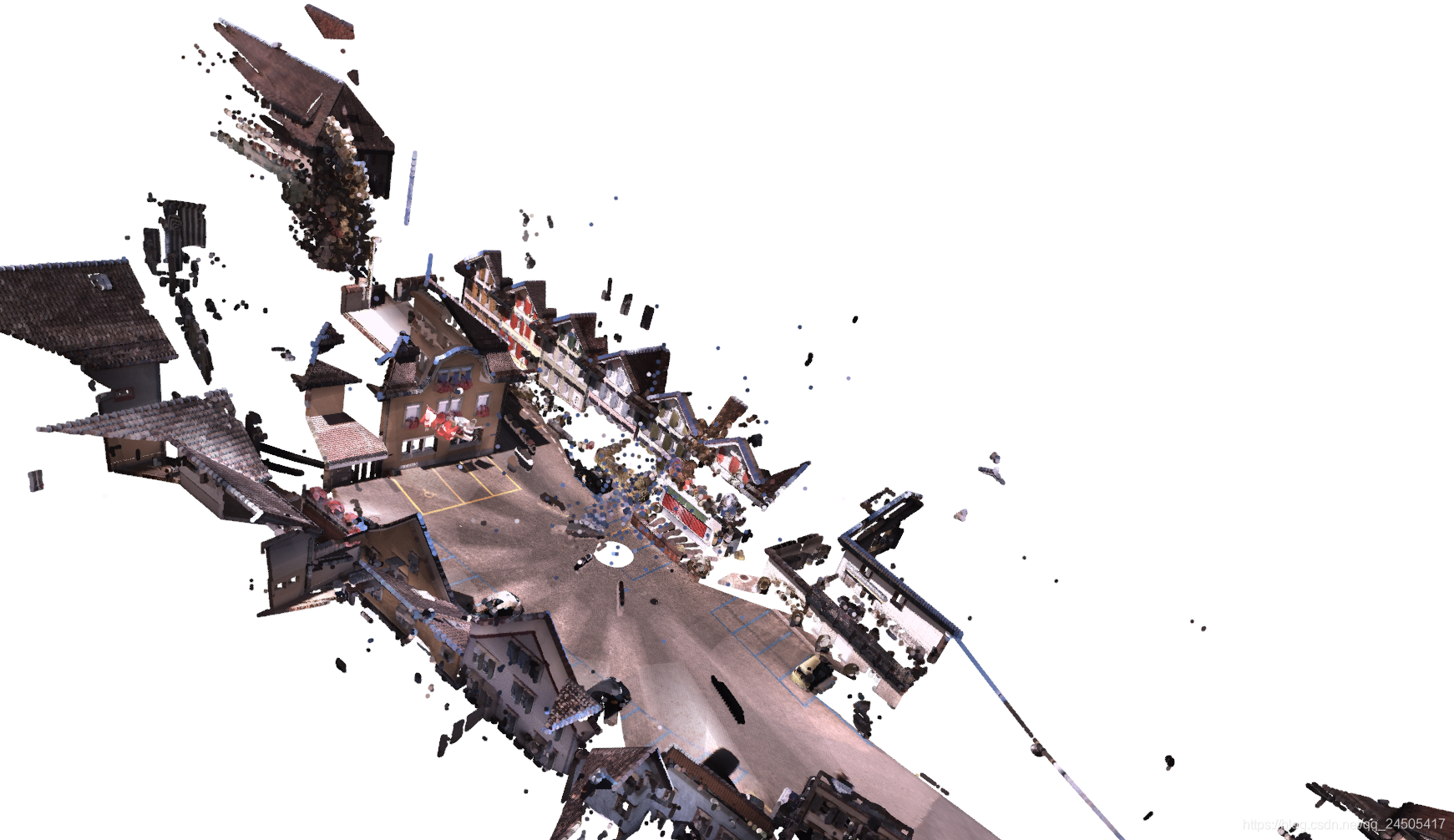
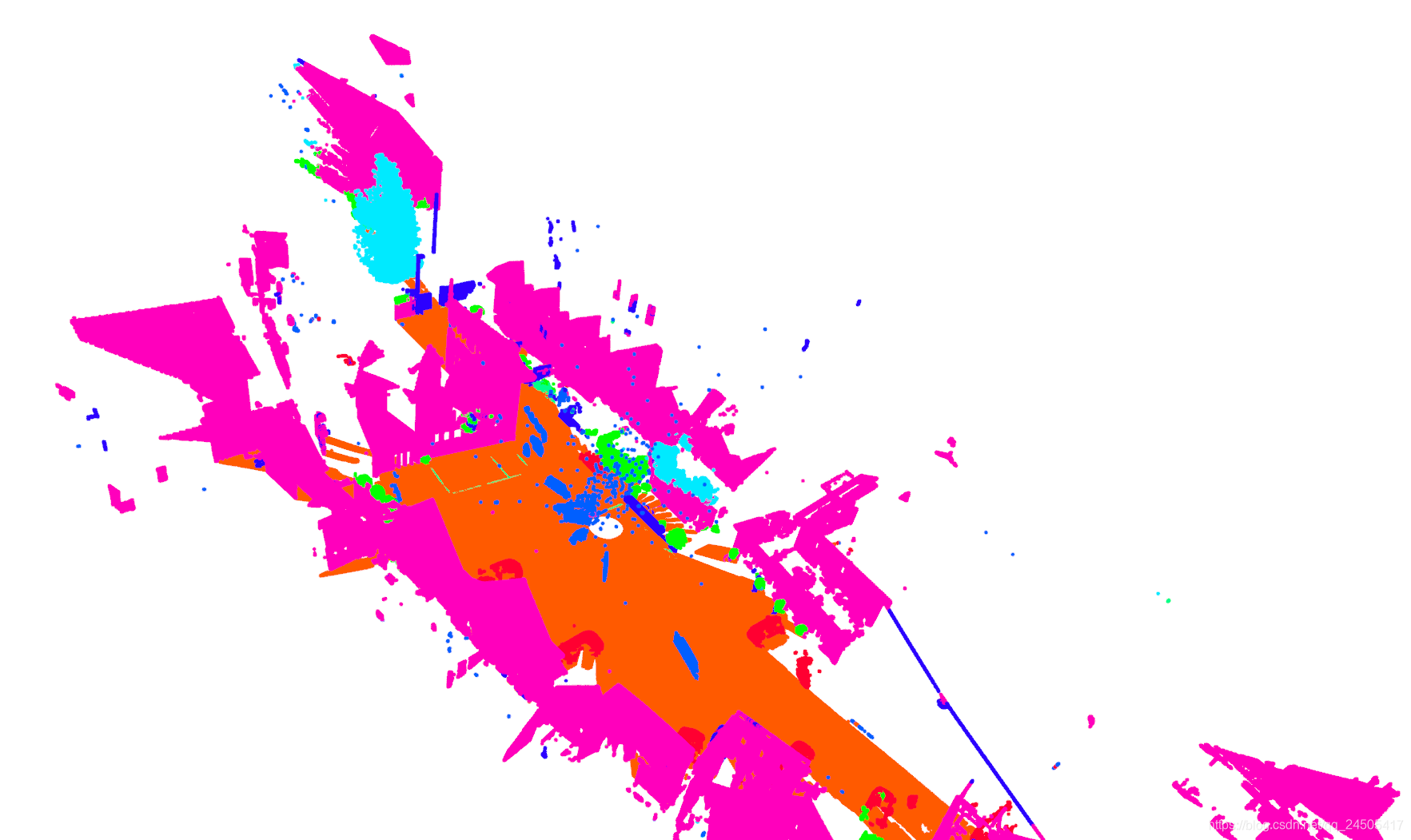
场景1: MarketplaceFeldkirch_Station4_rgb_intensity-reduced(上:原图;下图:预测结果)
场景2 : sg27_station10_rgb_intensity-reduced

















 8045
8045

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









