







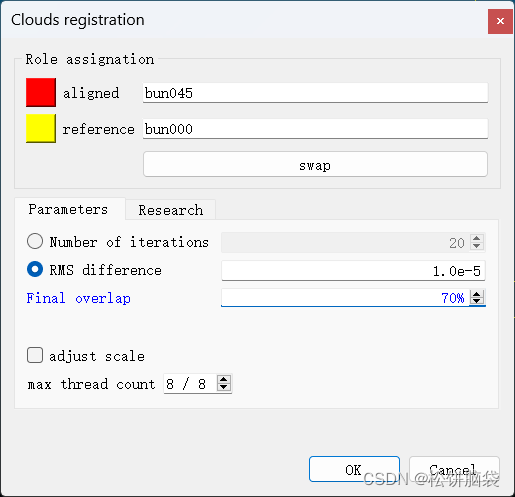
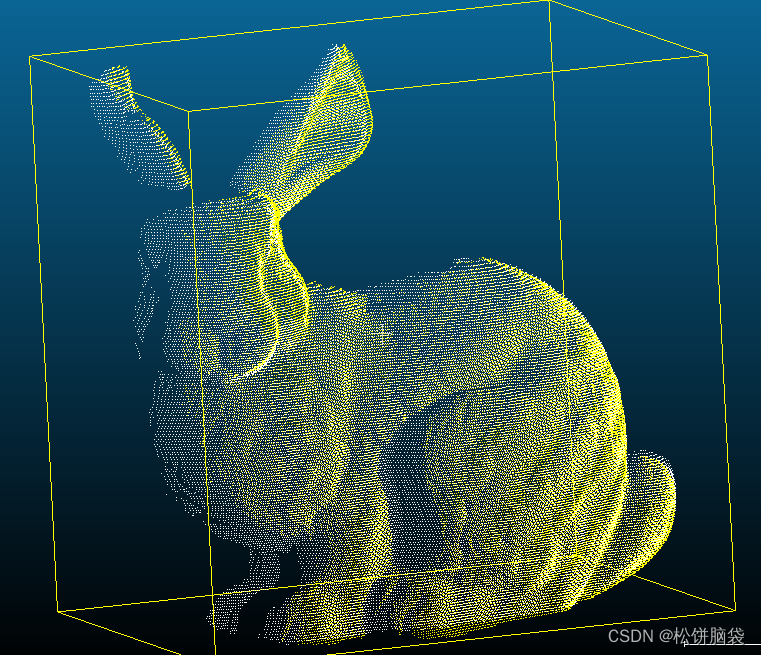
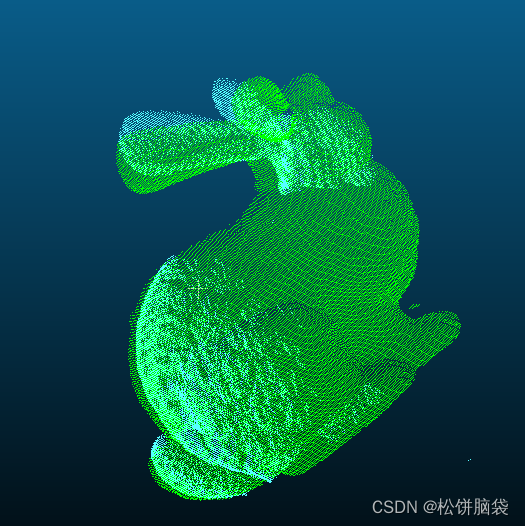
| 三、实验内容及步骤: 1、使用ICP的点云配准方法配准斯坦福的兔子点云 1.1 、Fine registration是一种基于ICP(Iterative Closest Point)算法的点云配准方法。ICP通过最小化目标点云与参考点云之间的距离来寻找最佳变换矩阵,从而将两个点云对齐。ICP使用迭代的方式,每一次迭代都会计算一个刚体变换矩阵,并将目标点云进行变换,使得变换后的目标点云与参考点云更加接近。这个过程会不断重复直到满足终止条件为止。Fine registration使用ICP算法进行点云配准时,会根据指定的参数设置执行若干次ICP迭代,以便更好地对齐目标点云和参考点云。此外,Fine registration还提供了其他参数选项,例如采样密度、匹配距离等,用于进一步优化配准结果。 1.2、分析实验数据,进行配准 1.2.1、实验数据为0~315度的六组兔子点云数据,想把六个配准到一起,采取方法如下 1)把45度的兔子点云往0度上配准 2)把90度的兔子点云往新的45度上配准 3)把180度的兔子点云往新的90度上配准 4)把315度的兔子点云往0度上配准 5)把270度的兔子点云往新的315度上配准 1.2.2、把45度的兔子点云往0度上配准 Aligned为转换的点云数据,所以应为45度点云数据,此时将重叠度改成70%,确保两个点云之间有足够的重叠区域,配准完成后将新的45度的兔子点云颜色设为黄色,以便观察配准完成后的情况,如下图所示
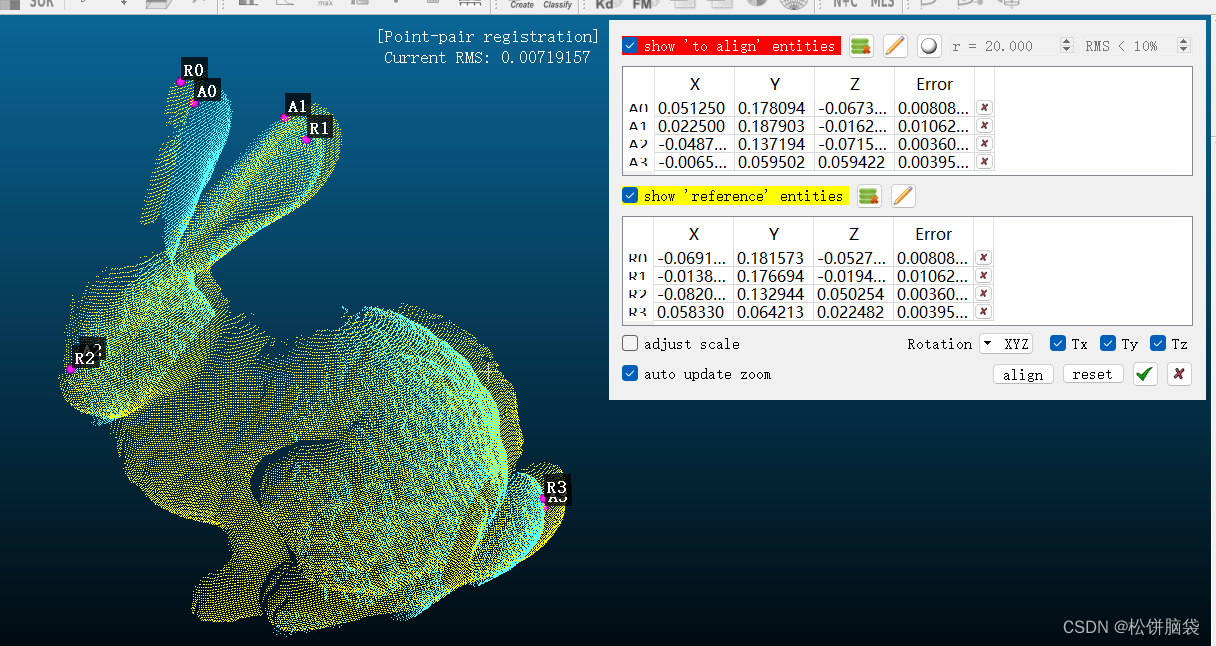
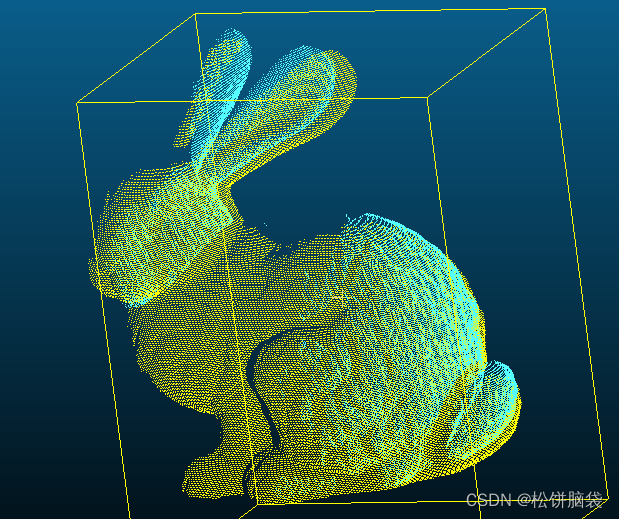
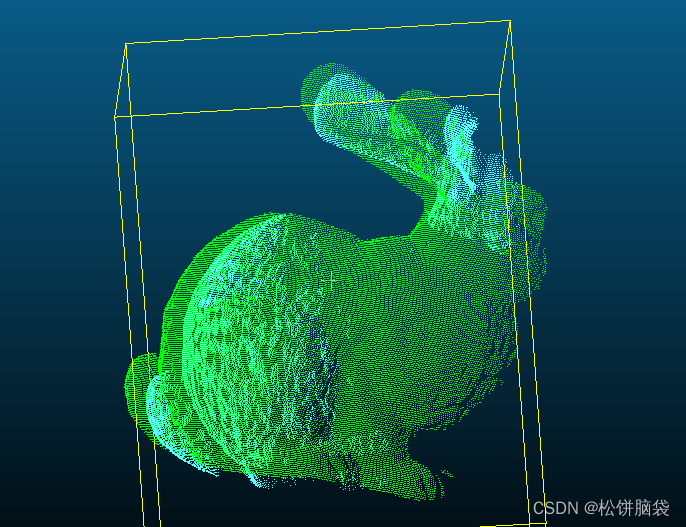
1.2.3、把90度的兔子点云往新的45度上配准 此时使用ICP算法时会陷入局部最优的问题 原因是在兔子后半身的类似圆球的两个点云在某些区域内非常相似且连续,这些区域就可能构成局部平坦区域。优化算法容易在这些区域中卡住,并将解认为是最优解,从而导致局部最优问题。 此时先对90度的原始数据设为蓝色,使用Align工具选取四个特征点,左耳一组,右耳一组,尾巴一组,嘴巴一组,大致先将两组点云数据配到一起,再使用ICP算法配准
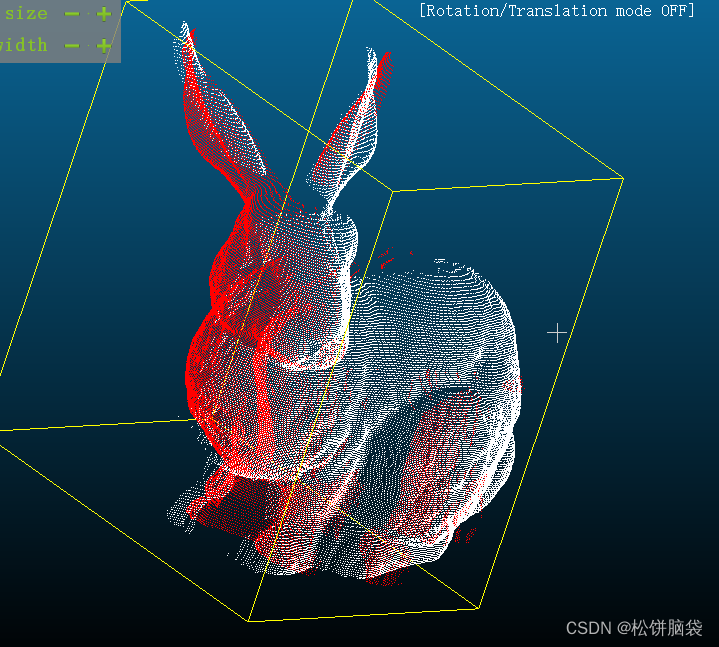
1.2.4、把180度的兔子点云往新的90度上配准 在观察180度的兔子点云数据时,会发现它的范围很大,是因为其在很远的地方也有点云数据,先使用裁剪工具把那个极远的点删除。再把180度的点云树的颜色改为绿色,因180度与新的90度跨度较大,采取的配准方法为先手动粗配准,对180度的兔子点云数据进行旋转操作,再使用ICP算法进行配准
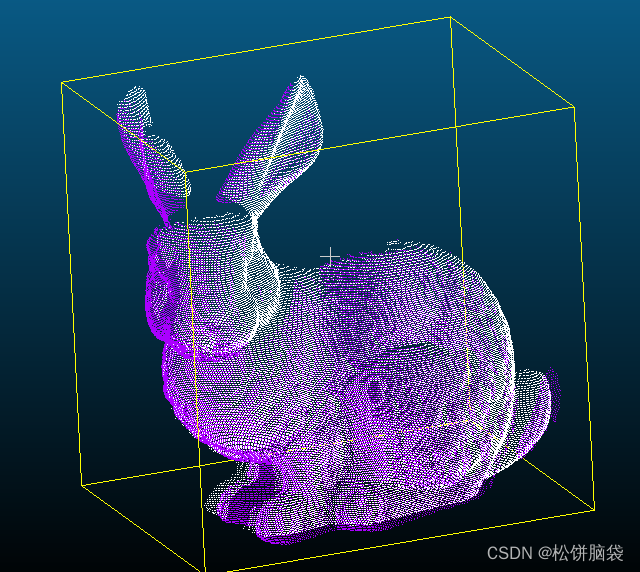
1.2.5、把315度的兔子点云往0度上配准,270度的兔子点云往新的315度上配准 将315度的兔子的点云颜色改为紫色,先将315度的兔子进行旋转平移操作大致与0度的点云重叠,然后再使用ICP算法再次配准。270度的兔子采取大致的操作得到结果图
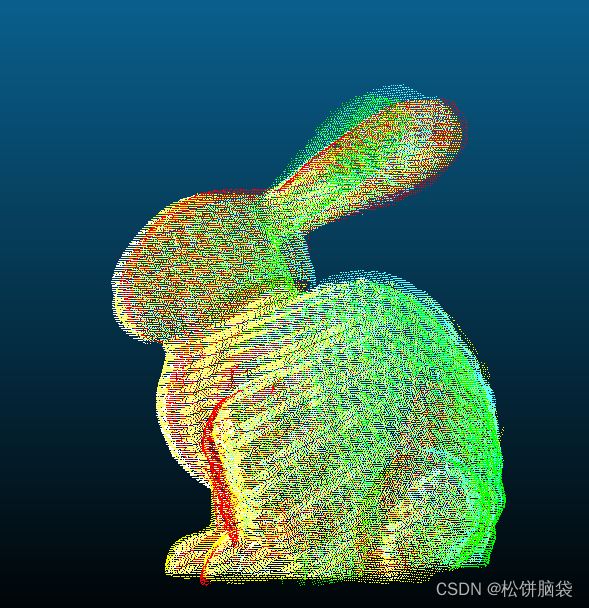
1.2.6、配准后的6个兔子总结果图
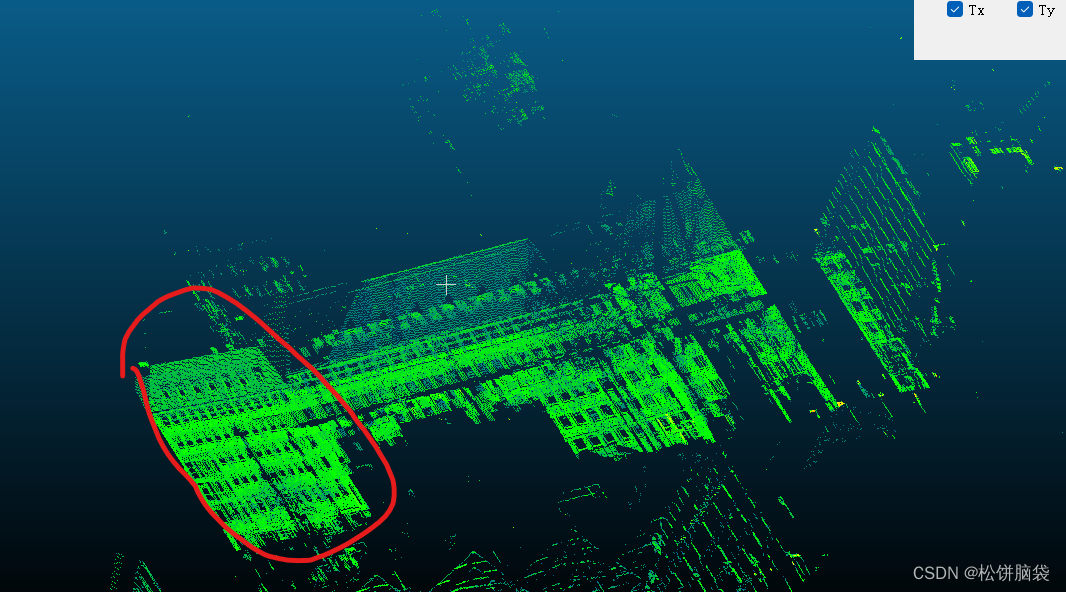
图5 配准后的总结果图 2、室外场景点云数据 TLS 2.1、找到四幅影响图的共同点位,进行旋转和平移达到粗配准的要求 例如在对000和001两幅图进行配准时,以这栋建筑物的窗口是否对准为标准,在之后的002和003数据中均使用该方法完成粗配准
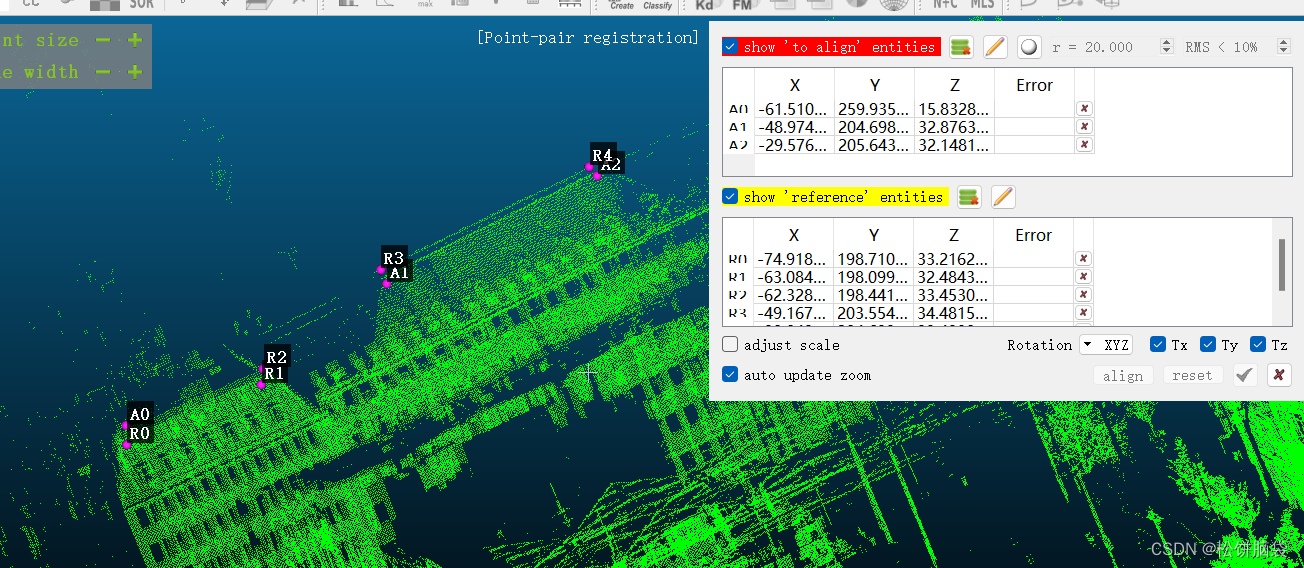
图6 配准0和1两张图 2.2、在之后的四幅图都大致完成配准后,使用Align工具选取房屋顶角的显著的特征点进行精确对准,也是如2.1一样依次的完成此操作
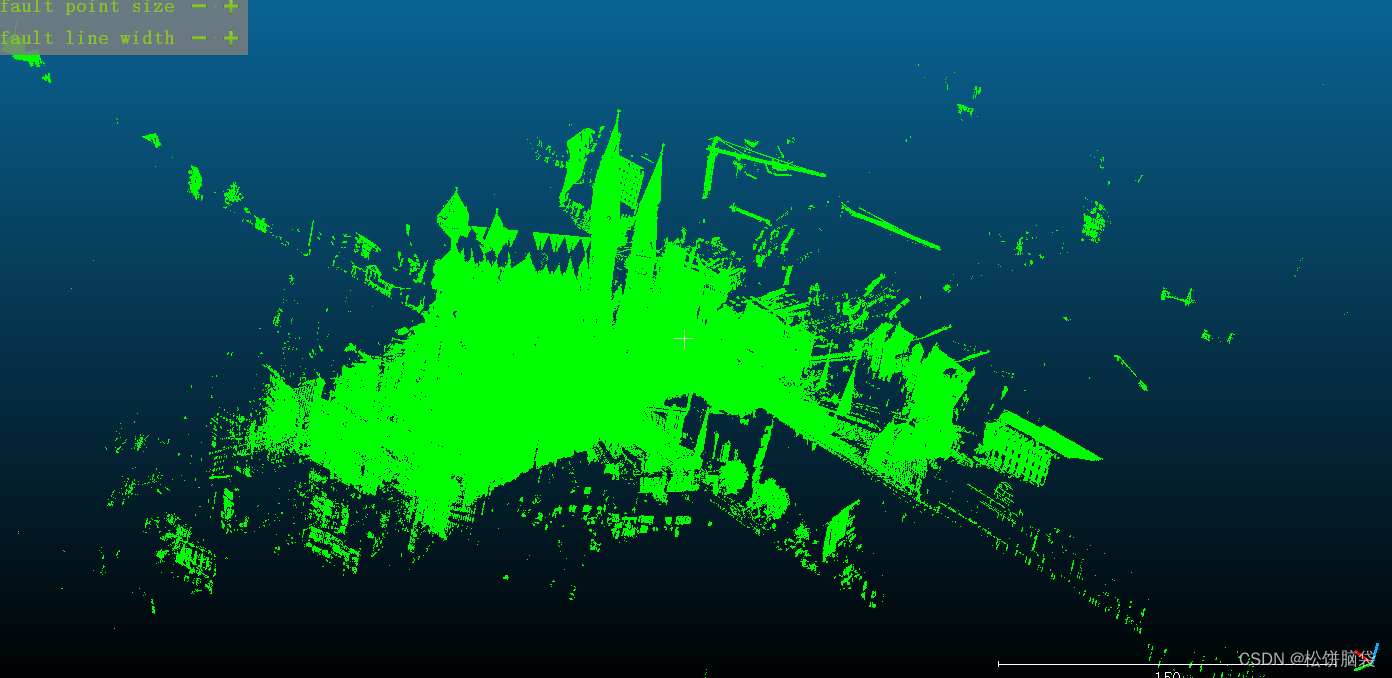
图7 使用Align工具进行精细配准 2.3、在四组数据大致达到了重叠度较高的情况下,使用ICP算法依次以001到000的顺序再次配准,查看刚才粗配准时的建筑物点云数据得到点云重合数据较高,得到最终实验结果图
图8 最终实验结果图 | ||||||||||||||||||||||||

















04-28
 1209
1209
1209
03-23

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









