







 本文介绍了一种从雷达点云数据中提取三维坐标,将其转化为灰度图像,并通过图像处理技术如二值化、闭运算等进行特征提取的方法。重点在于如何定位并计算图像中特定目标(如装载车线缆)的中心点坐标。
本文介绍了一种从雷达点云数据中提取三维坐标,将其转化为灰度图像,并通过图像处理技术如二值化、闭运算等进行特征提取的方法。重点在于如何定位并计算图像中特定目标(如装载车线缆)的中心点坐标。
需求:从雷达中获取z和x轴左边,利用雷达分辨率角度计算每点y,构成完成的三维坐标。利用z轴坐标进行灰度值转换,将三维坐标转换成二维坐标(灰度图),然后二值化、闭运算、查找轮廓、计算图像矩以及中心点
找出一辆装载车中12个线缆的二维坐标中心点
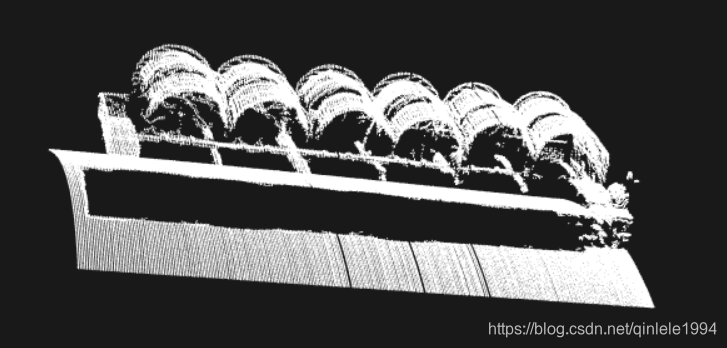
原始点云:
转为灰度二维图像:

二值图:

形态学滤波:闭运算

查找轮廓、图像矩:

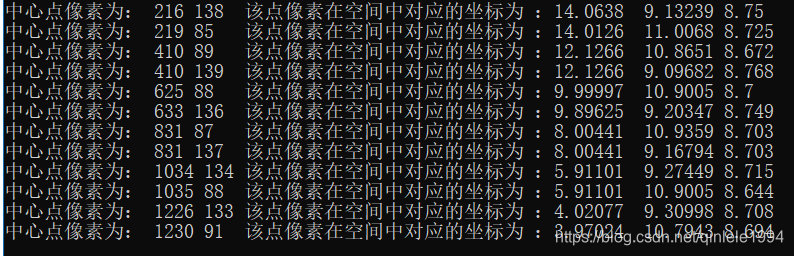
中心点像素坐标以及对应空间坐标:
查找中心点部分步骤代码:
//查找轮廓
vector<vector<Point>> contours; //存放轮廓
vector<Vec4i> hierarchy; //存放每个轮廓的拓扑信息
findContours(srcImage, contours, hierarchy, RETR_CCOMP, CHAIN_APPROX_SIMPLE);
//计算每个轮廓对象的矩
vector<Moments> mu(contours.size()); //存储每个轮廓对象的矩
for (size_t i = 0; i < contours.size(); i++)
{
mu[i] = moments(contours[i], false); //每个轮廓存入每个矩中,第一个参数是二维数组,存放每个轮廓的二维点
}
//计算图像的质心
vector<Point2f> mc(contours.size()); //存储每个矩的中心点
for (int i = 0; i < contours.size(); i++)
{
mc[i] = Point2f(mu[i].m10 / mu[i].m00, mu[i].m01 / mu[i].m00);
}
cout <<"查找的轮廓数量为: " <<contours.size() << endl;
//绘制轮廓
RNG rng(12345);
Mat dstImage = Mat::zeros(srcImage.rows, srcImage.cols, CV_8SC3);
cout << "目标矩形的中心点像素坐标为:" << endl;
vector<MYPOINT2> POINT2;
for (int i = 0; i < contours.size(); i++)
{
Scalar color = Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
drawContours(dstImage, contours, i, color, 2, 8, hierarchy, 0, Point());
//根据矩形像素面积的大小,去掉查找到的错误矩形
if ((contourArea(contours[i]) > 6000) && (contourArea(contours[i]) < 8000))
{
MYPOINT2 P;
circle(dstImage, mc[i], 4, color, -1, 8, 0);
P.i = mc[i].x;
P.j = mc[i].y;
POINT2.push_back(P);
cout << mc[i] << endl;
}
}
//为了方便比较,创建中心像素点数组和结构体数组,遍历比较
//得出中心像素点所对应的三维坐标
for (int i = 0; i < POINTS.size(); i++)
{
for (int j = 0; j < POINT2.size(); j++)
{
if ((POINTS[i].I == POINT2[j].i) && (POINTS[i].J == POINT2[j].j))
{
cout << "中心点像素为: " << POINT2[j].i << " " << POINT2[j].j <<
" 该点像素在空间中对应的坐标为 :" << POINTS[i].X << " "
<< POINTS[i].Y << " "
<< POINTS[i].Z << endl;
}
}
}
已经完成老大布置的任务其中一小部分了,下面就是求装载车的车高。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









