随着软件的Web化越来越流行,我也开始尝试将Web技术应用到设备参数配置中。之前,我曾使用Vue设计Web页面,并将其发布到嵌入式的Linux系统上,结合web服务器运行,实现了类似路由器配置界面的功能。这种基于Web的方式方便直观,大大提高了设备配置的效率。未来一段时间,我将主要从事雷达相关工作,于是我开始思考,是否也可以通过Web技术来实现雷达回波的可视化?基于这一想法,我利用一些碎片时间着手开发该项目,最终完成了基于OpenLayers的雷达回波显示功能。
实现原理
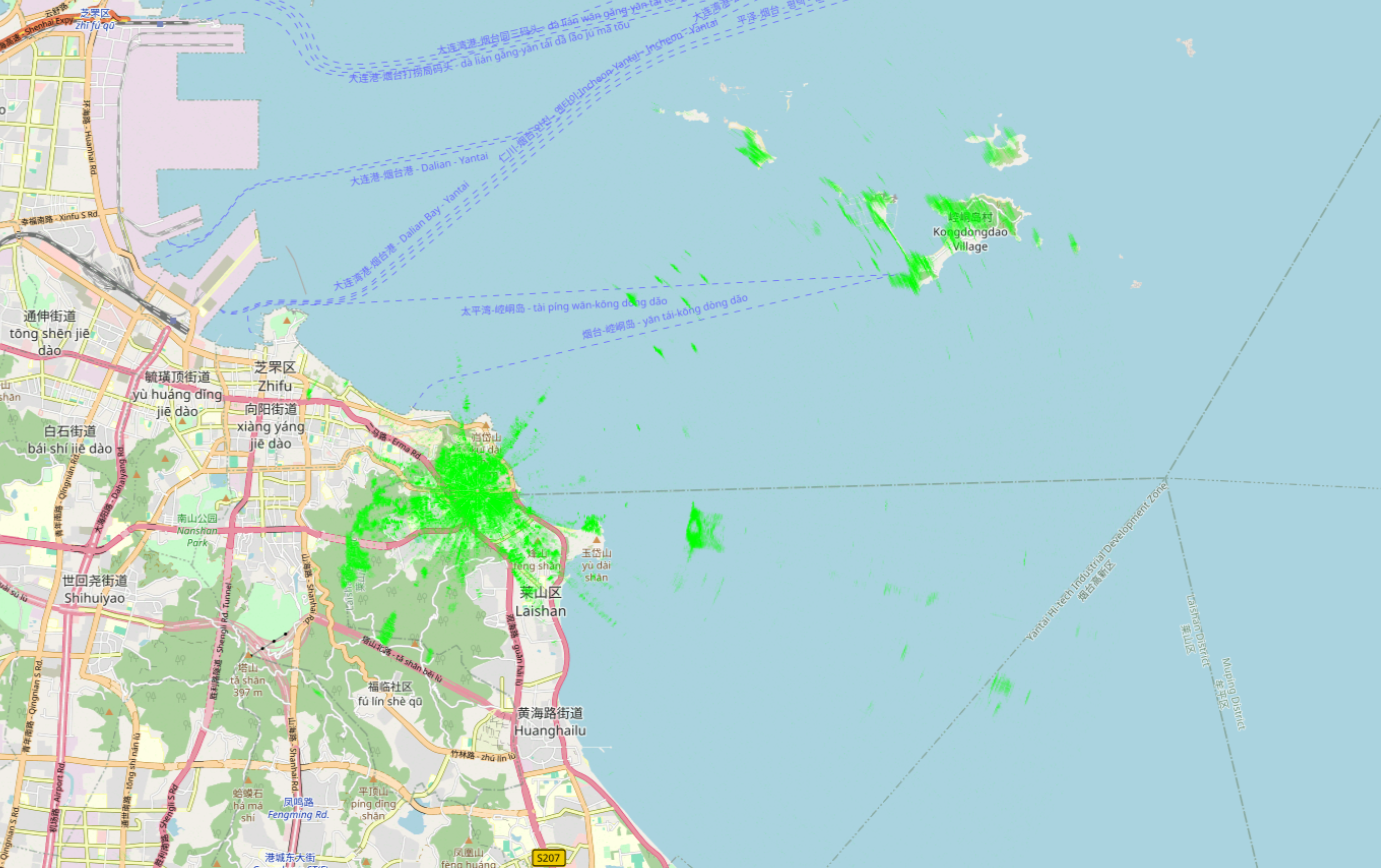
项目采用B/S架构设计,其中前端采用Vue+openlayers,后端采用python编写。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2409
2409







