







 文章讨论了在更换不同规格TFT屏幕时遇到的点亮问题,发现BL针脚的高电平控制至关重要。作者分享了合宙和另一款TFT屏幕的差异以及解决方法,提示其他用户在遇到类似问题时检查BL针脚的电平设置。
文章讨论了在更换不同规格TFT屏幕时遇到的点亮问题,发现BL针脚的高电平控制至关重要。作者分享了合宙和另一款TFT屏幕的差异以及解决方法,提示其他用户在遇到类似问题时检查BL针脚的电平设置。
这个问题说到底一方面是经验问题,另外一方面是很多厂的线路设计还是有很大不同导致的。
之前有一块合宙的1.8 的屏接上7根线就可以亮,正常接上GND和VCC不接其他pin屏幕也能亮起来。
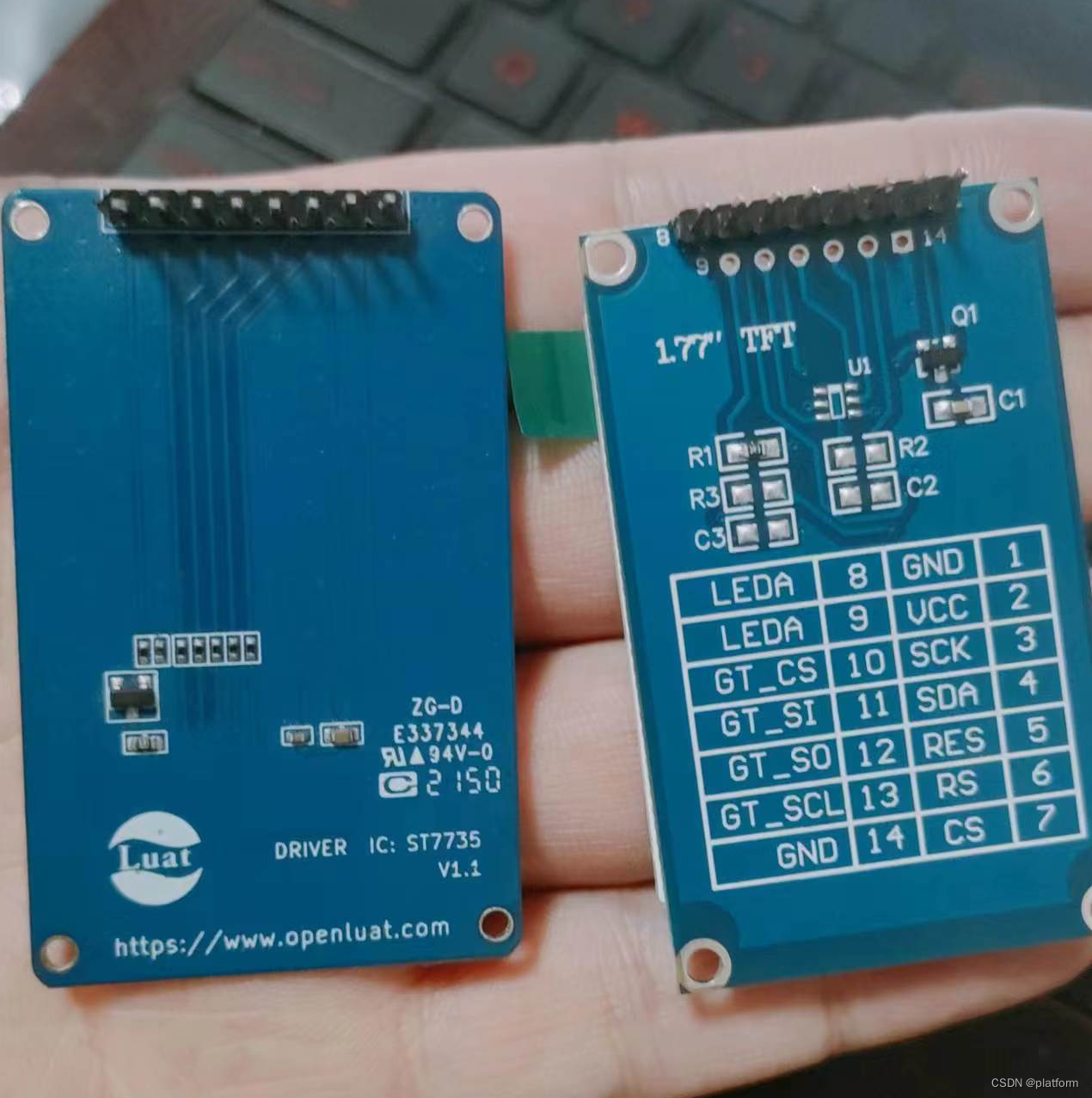
最近买了三块tft,不同规格,其中一块和合宙的驱动芯片和线序,屏幕尺寸一模一样,但是就是怎么都点亮不了。
接上8根线,在tft_espi中正常设施也不生效

怎么试都不行,以为屏坏了,最后联系上卖家得到了技术支持
BL针脚要接高电平,成功点亮
在tft_espi 中设置
#define TFT_BL D1 // LED back-light
并不能生效
不过针对D1这个GPIO,直接设置为高电平反而生效:
pinMode(D1,OUTPUT);
digitalWrite(D1,HIGH);
屏幕可以点亮。
其他屏幕,只要正常接上GND和VCC都可以亮起来,8pin的 屏幕,各位如果点不亮请检查一下BL这个针脚到底是高还是低。

















 1379
1379

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









