



1.部署环境
在proxy主机家目录下将lnmp_soft.tar.gz拷贝到web1
scp lnmp_soft.tar.gz 192.168.2.100:
tar -xf lnmp_soft.tar.gz
cd lnmp_soft/
tar -xf nginx-1.17.6.tar.gz
cd nginx-1.17.6/
yum -y install gcc make pcre-devel openssl-devel
./configure //配置
make //编译
make install //安装
yum -y install mariadb mariadb-server mariadb-devel //安装数据库相关软件包
yum -y install php php-mysql php-fpm //安装php相关软件包
systemctl start mariadb
systemctl start php-fpm
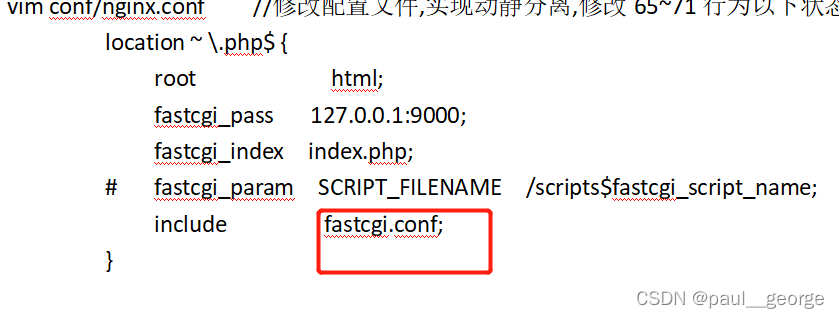
vim conf/nginx.conf //修改配置文件,实现动静分离,
修改65~71行为以下状态
配置好lnmp之后
[root@web1 nginx]# systemctl stop httpd
[root@web1 nginx]# systemctl stop firewalld
[root@web1 nginx]# sbin/nginx //开启服务
配置好lnmp之后
cd ~/lnmp_soft/php_scripts/
tar -xf php-memcached-demo.tar.gz //释放带登录功能的网页
cp -r php-memcached-demo/* /usr/local/nginx/html/ //拷贝页面
火狐浏览器访问http://192.168.2.100/index.php
sbin/nginx-s #重新家在服务
火狐浏览器访问http://192.168.2.5/index.php


Session 存储在服务器端,保存用户名、登录状态等信息
Cookies 由服务器下发给客户端,保存在客户端的一个文件保存的主要内容是sessionID
删除web1和web2的session页面
rm -rf /var/lib/php/session/*
火狐浏览器访问http://192.168.2.5/index.php 登陆两次才算成功,目前两次是正常现象
到web1与web2主机修改存储session文件的位置

改成memcache,表示session的存储不在是本地的普通文件,而是去找memcache
tcp://192.168.2.5:11211 //这里的路径修改为安装了memcache服务的服务器地址与端口
yum -y install php-pecl-memcache //安装php与memcached服务关联的软件包
systemctl restart php-fpm
所有主机关闭防火墙和selinux
最后清空浏览器的历史记录,再访问http://192.168.2.5/index.php仅仅登录一次即可成功

















 2094
2094

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









