



第11章 外周神经刺激
11.1 足下垂刺激器
11.1.1 引言
在正常步态模式中,膝关节伸展,使小腿向前摆动,足部背屈并上抬,以 Clearance 地面。随后腿部伸展,身体前移,导致足跟触地,接着足部下放时发生跖屈。之后进入步态的“脚趾离地”阶段,在此阶段,脚跟在步态的推进阶段开始抬起(图11.1)。
偏瘫性足下垂是中风后常见的步态紊乱原因,表现为身体一侧部分或完全瘫痪。在足下垂情况下,背屈无法自主控制,导致足跟触地后足部“拍击”地面,并在步态摆动相期间拖拽足部。通过电刺激支配胫骨肌的神经可实现背屈,该肌肉是负责背屈的主要肌群;也可刺激腓总神经,引发背屈反应并导致膝关节和足部屈曲,从而将足部抬离地面。当足部发生背屈时,电神经刺激还可能引起踝关节的旋转(外翻)。因此,一些刺激器提供额外通道以刺激腓神经浅支,从而对踝关节进行矫正性旋转。表11.1列出了用于足下垂矫正的神经支配及肌群。
在足跟触地后不久发生背屈的电刺激时机,可通过在鞋底安装脚踏开关来检测足跟触地的发生,从而关闭背屈电刺激,使足自然下垂。在足尖离地时,足跟开关的压力被释放,激活刺激器,引起足在摆动相的背屈。
| 神经 | 肌肉 | 作用 |
|---|---|---|
| 腓深神经 | 胫骨前肌 | 背屈足、足内翻 |
| 拇长伸肌 | 伸展大脚趾、背屈足、足内翻 | |
| 趾长伸肌 | 背屈足、伸展脚趾 | |
| 腓骨第三肌 | 背屈足、足外翻 | |
| 趾短伸肌 | 伸展脚趾 | |
| 拇短伸肌 | 伸展大脚趾 | |
| 腓浅神经 | 腓骨长肌 | 足跖屈、足外翻 |
| 腓骨短肌 | 足跖屈、足外翻 |
步态相位。检测足跟触地的其他方法包括使用加速度计检测步态摆动相,以及在腓肠神经上植入传感器来检测与足跟触地相关的感觉神经活动。
11.1.2 STIMuSTEPs Finetech Medical有限公司
STIMuSTEPs通过向支配瘫痪肌肉的神经施加电刺激脉冲,帮助矫正足下垂,以实现踝背屈和外翻。

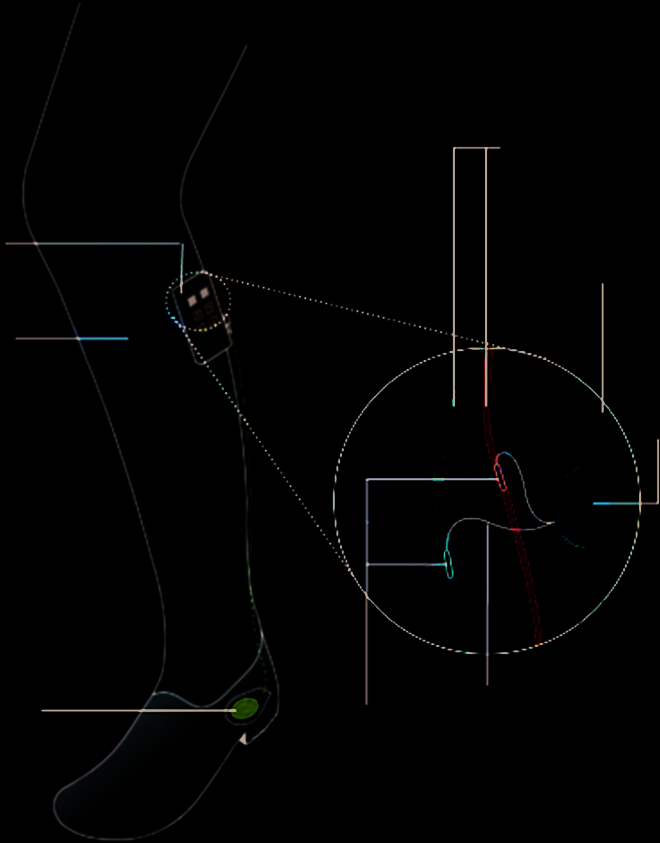
STIMuSTEPs如图11.2 所示,包含一个植入式接收器(D)、一根由铂铱合金丝制成的电缆(E)以及两对双极神经外膜电极,每对电极分别插入腓总神经深支(F)和浅支的神经外膜中。一个置于鞋内脚跟下方的脚踏开关(C)连接到绑在小腿(B)上的外部控制器 (A)。电源和控制信号通过收发线圈从外部控制器感应传输至接收器。
在步态摆动相开始时,脚踏开关检测到足跟抬起,并向外部控制器发出信号,以传输电力和控制信号至接收器,随后接收器输出一系列电刺激模式向两个双极神经电极施加刺激脉冲,以引起足部背屈和旋转。刺激由单相脉冲组成,刺激频率为30赫兹。
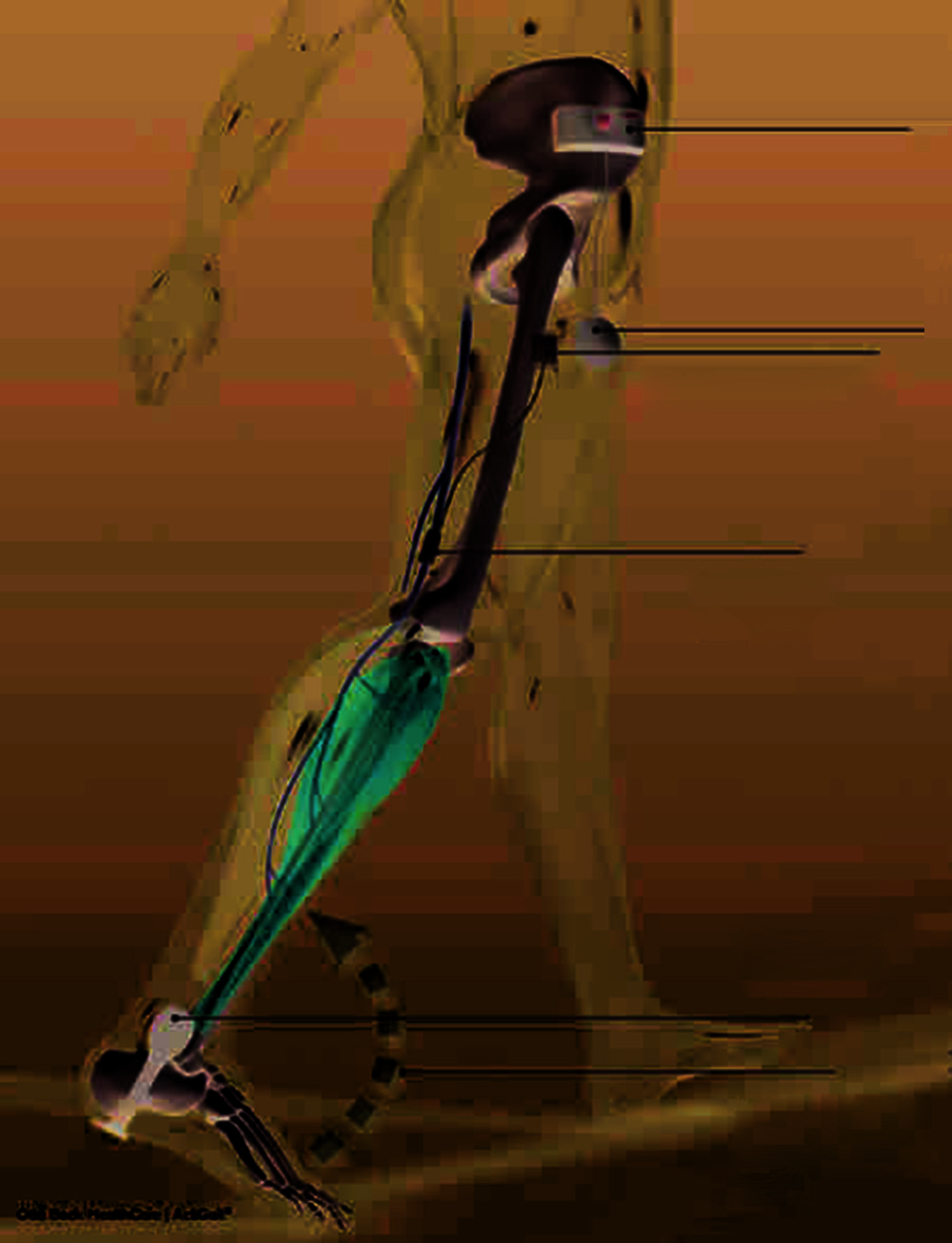
图11.3 显示了用于治疗足下垂的刺激模式,该模式在足跟抬起后刺激脉冲宽度逐渐增加(上升阶段),并在足跟触地后经过预设延迟时间开始逐渐减小(下降阶段)。两个通道的刺激脉冲为交错且互补的,使得在步态摆动相期间始终有一个双极电极处于激活状态。表11.2提供了植入物的可调式可编程刺激参数。
| 参数 | 显示 | 范围 | 单位 | 描述 | 默认 |
|---|---|---|---|---|---|
| 输出功率级别 | Po | 1-2 | 任意选择控制器的供电电压 | 1 | |
| 脚跟触地超时 (Thsto) | Ht | 0.1-5.0 | 0.1 秒 | 事件发生前斜坡下降的时间 无脚跟触地 | 3 |
| 上升时间 1 (Tru1) | u1 | 0.0-5.0 | 0.1 秒 | 刺激在通道1上升至预设水平所需时间 | 0.5 |
| 上升时间 2 (Tru2) | u2 | 0.0-5.0 | 0.1 秒 | 刺激上升至通道2上的预设水平所需时间 | 0.5 |
| 下降时间 1 (Trd1) | d1 | 0.0-5.0 | 0.1 秒 | 刺激逐渐减弱所需时间 通道1上的零值 | 0.2 |
| 下降时间 2 (Trd2) | d2 | 0.0-5.0 | 0.1 秒 | 刺激逐渐减弱所需时间 通道2上的零 | 0.2 |
| 伸展时间 1 (Text1) | E1 | 0.0-5.0 | 0.1 秒 | 从脚跟着地到通道1开始斜坡下降的时间延迟 | 0.3 |
| 伸展时间 2 (Text2) | E2 | 0.0-5.0 | 0.1 秒 | 从脚跟着地到通道2开始斜坡下降的时间延迟 | 0.3 |
| 空闲超时(正常模式) | tO | 01-60 | 分钟 | 正常模式下的自动关机时间 | 60 |
| 空闲超时(设置模式) | tS | 01-10 | 分钟 | 水平模式下的自动关机时间和参数模式 | 10 |
11.1.3 ActiGait s,奥托博克
ActiGait s用于中风引起的足下垂矫正或背屈无力,这种情况会导致参与背屈的肌肉出现部分或完全瘫痪。

The ActiGait s在图11.4 中所示,包含一个四通道可植入刺激器,该刺激器皮下植入于大腿,并连接至一个袖套电极,该袖套电极环绕植入于膝关节腘窝上方的腓总神经周围。该袖套电极由12个铂铱合金神经接触盘组成,排列为四组,每组三个触点,分别连接至刺激器的四个独立通道。
天线附着在植入式刺激器上方的皮肤上,并通过外部导线连接到可夹在用户腰带上的控制器。足跟开关固定在专用袜子中并放置于鞋内的足底,在步态摆动相期间无线发送信号至控制器,以启动对腓神经的刺激,从而影响足的背屈。足跟开关由自带电池供电,预计电池寿命为1年,而控制器则为完全可充电的。
11.2 手握式刺激器
中风和脊髓损伤患者,尤其是上运动区受损时,可能会失去手部功能,导致握力丧失。这是由于前臂伸肌的部分或完全神经激活丧失所致,而这些肌肉对手腕和手指伸展至关重要。在抓握动作中,手指和手腕的伸展使手指松开。
支配手部的主要神经有三条:桡神经、尺侧神经和正中神经。桡神经的一个分支是骨间后神经,神经支配前臂的伸肌,实现手腕、手指和拇指的伸展。表11.3列出了手部功能的主要运动神经支配。
第11章 外周神经刺激(续)
11.2 手握式刺激器(续)
11.2.1 STIMuGRIPs Finetech Medical有限公司
STIMuGRIPs 使用电神经刺激帮助恢复腕关节伸展以及手指的后续伸展,以打开手部,恢复抓握功能。
STIMuGRIPs系统由一个双通道植入式接收器、两对肌外膜电极、一个外部控制器以及固定在手臂外侧的集成三轴加速度计组成(图 11.6)。肌外膜电极由直径为4 mm的铂电极构成,这些电极固定在绝缘基底上,以尽量减少电刺激电流向其他可兴奋组织的扩散。电极采用双极配置,其中一对电极放置在桡侧腕短伸肌的运动点上,用于诱发并维持腕关节伸展;另一对电极则放置在骨间神经上,以实现手指伸展。控制器可检测手臂的角位移,从而根据不同检测到的角运动预设多种刺激策略,以适应广泛的活动需求。例如,当前臂移动至水平位置时,启动程序1的刺激策略,即先进行腕关节伸展,随后进行手指伸展;当手臂恢复原位时,刺激关闭,而由于手部的自然痉挛性,手指会自然地闭合并抓握目标物体。相反,手臂左右方向移动则可启动程序2,仅产生腕关节伸展而不引发后续的手指伸展。
图11.7 展示了一个刺激周期的示例,其中抬起前臂会触发腕关节伸展和手指伸展的刺激,从而使手张开。经过预设的时间间隔后,手指伸展的刺激关闭,由于手部自身的痉挛性,手会闭合并抓握物体,从而可以将其提起。当降低前臂时,在施加刺激以张开手并释放对物体的抓握之前,存在一个预设的时间间隔。进一步降低手臂将关闭刺激器。
| 神经 | 肌肉 | 作用 |
|---|---|---|
| 骨间后神经 | 尺侧腕伸肌 | 伸展手腕、手指和拇指 |
| 小指伸肌 | 趾长伸肌 | |
| 示指伸肌 | 桡侧腕短伸肌 | |
| 桡侧腕长伸肌 | ||
| 尺侧 | 骨间肌 | 使手指分开、在指关节处弯曲手指 |
| 拇收肌 | 使拇指后移、朝向手部 | |
| 正中神经 | 大鱼际 | 拇指对掌 |


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









