









 本文解析了一道路径规划算法竞赛题目,描述了如何避免两个角色在从宿舍到教室的路径上相遇的方法。通过数学组合的方式计算不同路径的数量,并考虑路径相交的情况,最终输出安全到达目的地的不同路径数量。
本文解析了一道路径规划算法竞赛题目,描述了如何避免两个角色在从宿舍到教室的路径上相遇的方法。通过数学组合的方式计算不同路径的数量,并考虑路径相交的情况,最终输出安全到达目的地的不同路径数量。
A Path Plan
时间限制: 1 Sec 内存限制: 128 MB
题目描述
WNJXYK hates Destinys so that he does not want to meet him at any time. Luckily, their classrooms and dormitories are at different places. The only chance for them to meet each other is on their way to classrooms from dormitories.
To simple this question, we can assume that the map of school is a normal rectangular 2D net. WNJXYK’s dormitory located at (0,y_1) and his classroom located at (x_1,0). Destinys’s dormitory located at (0,y_2) and his classroom is located at (x_2,0). On their way to classrooms, they can do two kinds of movement : (x,y)→(x,y-1) and (x,y)→(x+1,y).
WNJXYK does not want to meet Destinys so that he thinks that it is not safe to let his path to classroom from dormitory has any intersect point with Destinys ‘s. And then he wonders how many different paths for WNJXYK and Destinys arriving their classrooms from dormitories safely.
输入
The input starts with one line contains exactly one positive integer T which is the number of test cases.
Each test case contains one line with four positive integers x1,x2,y1,y2 which has been explained above.
输出
For each test case, output one line containing “y” where y is the number of different paths modulo 10^9+7.
样例输入
复制样例数据
3 1 2 1 2 2 3 2 4 4 9 3 13
样例输出
3 60 16886100
提示
T≤1000
x1<x2,y1<y2
0 < x1,x2,y1,y2≤100000
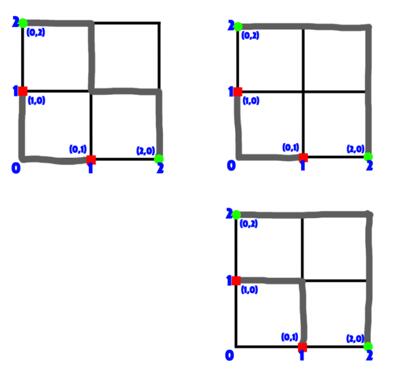
For Test Case 1, there are following three different ways.
从(0,y1)到(x1,0)有C(x1 + y1, x1)条路,因为有两个点,所以方案数为C( y1+x1,x1 ) * C( y2+x2,x2 ),
相交的部分我是真的没理解,方案数为C( x1+y2,x1 ) * C( x2+y1,x2 ),然后减一下,就过了??。。。
/**/
#include <cstdio>
#include <cstring>
#include <cmath>
#include <cctype>
#include <iostream>
#include <algorithm>
#include <map>
#include <set>
#include <vector>
#include <string>
#include <stack>
#include <queue>
typedef long long LL;
using namespace std;
int n;
int x1, x2, Y1, y2;
LL c[200005];
LL mod = 1e9 + 7;
LL inv(LL x, LL num){
LL res = 1 % mod;
x %= mod;
while(num){
if(num & 1) res = (res * x) % mod;
x = x * x % mod;
num >>= 1;
}
return res;
}
LL C(int x, int y){
LL dx = c[x], dy = c[x - y] * c[y] % mod;
return dx * inv(dy, mod - 2) % mod;
}
int main()
{
//freopen("in.txt", "r", stdin);
//freopen("out.txt", "w", stdout);
c[0] = 1;
for (int i = 1; i <= 200000; i++) c[i] = c[i - 1] * i % mod;
scanf("%d", &n);
while(n--){
scanf("%d %d %d %d", &x1, &x2, &Y1, &y2);
LL ans = C(x1 + Y1, x1) * C(x2 + y2, x2) % mod - C(x1 + y2, x1) * C(x2 + Y1, Y1) % mod;
printf("%lld\n", (ans % mod + mod) % mod);
}
return 0;
}
/**/

















 2361
2361

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









