




 本文介绍了极限运算的基本法则,包括有限个无穷小之和、有界函数与无穷小的乘积等概念,并探讨了极限的加法、乘法及除法规则。此外,还提到了两个重要的极限实例。
本文介绍了极限运算的基本法则,包括有限个无穷小之和、有界函数与无穷小的乘积等概念,并探讨了极限的加法、乘法及除法规则。此外,还提到了两个重要的极限实例。
1、极限运算法则
【定理一】有限个无穷小之和仍是无穷小。
【定理二】有界函数与无穷小的乘积仍是无穷小。
【推论一】常数与无穷小的乘积是无穷小。
【推论二】有限个无穷小的乘积是无穷小。
【定理三】(极限运算的分配律)
若
limf(x)=A
limf(x)=A
limf(x)=A
limg(x)=B lim g(x)=B limg(x)=B
则
1im[f(x)+g(x)])
1im[f(x)+g(x)])
1im[f(x)+g(x)])
存在,则
lim[f(x)+g(x)]=A+B=limf(x)±limg(x)
lim[f(x)+g(x)]=A+B=lim f(x)±limg(x)
lim[f(x)+g(x)]=A+B=limf(x)±limg(x)
【定理四】
若
limf(x)=A
limf(x)=A
limf(x)=A
limg(x)=B lim g(x)=B limg(x)=B
且
1im[f(x)∗g(x)])
1im[f(x)*g(x)])
1im[f(x)∗g(x)])
存在,则
lim[f(x)∗g(x)]=A∗B=limf(x)∗limg(x)
lim[f(x)*g(x)]=A*B=lim f(x)*limg(x)
lim[f(x)∗g(x)]=A∗B=limf(x)∗limg(x)
【定理五】
若
limf(x)=A
limf(x)=A
limf(x)=A
limg(x)=B lim g(x)=B limg(x)=B
B≠0,且
1imf(x)g(x)
1im\frac{f(x)}{g(x)}
1img(x)f(x)
存在,则
1imf(x)g(x)=AB=limf(x)limg(x)
1im\frac{f(x)}{g(x)}=\frac{A}{B}=\frac{limf(x)}{limg(x)}
1img(x)f(x)=BA=limg(x)limf(x)
对商的极限运算法则, 应注意条件:
(1)、极限 lim f(x)=A,lim g(x)=B均存在。
(2)、作分母的函数g(x)的极限 lim g(x)=B≠0。
当这两个条件中有一个不满足时, 不可使用商的极限运算法则。 这一点在初学时很容易被忽视。
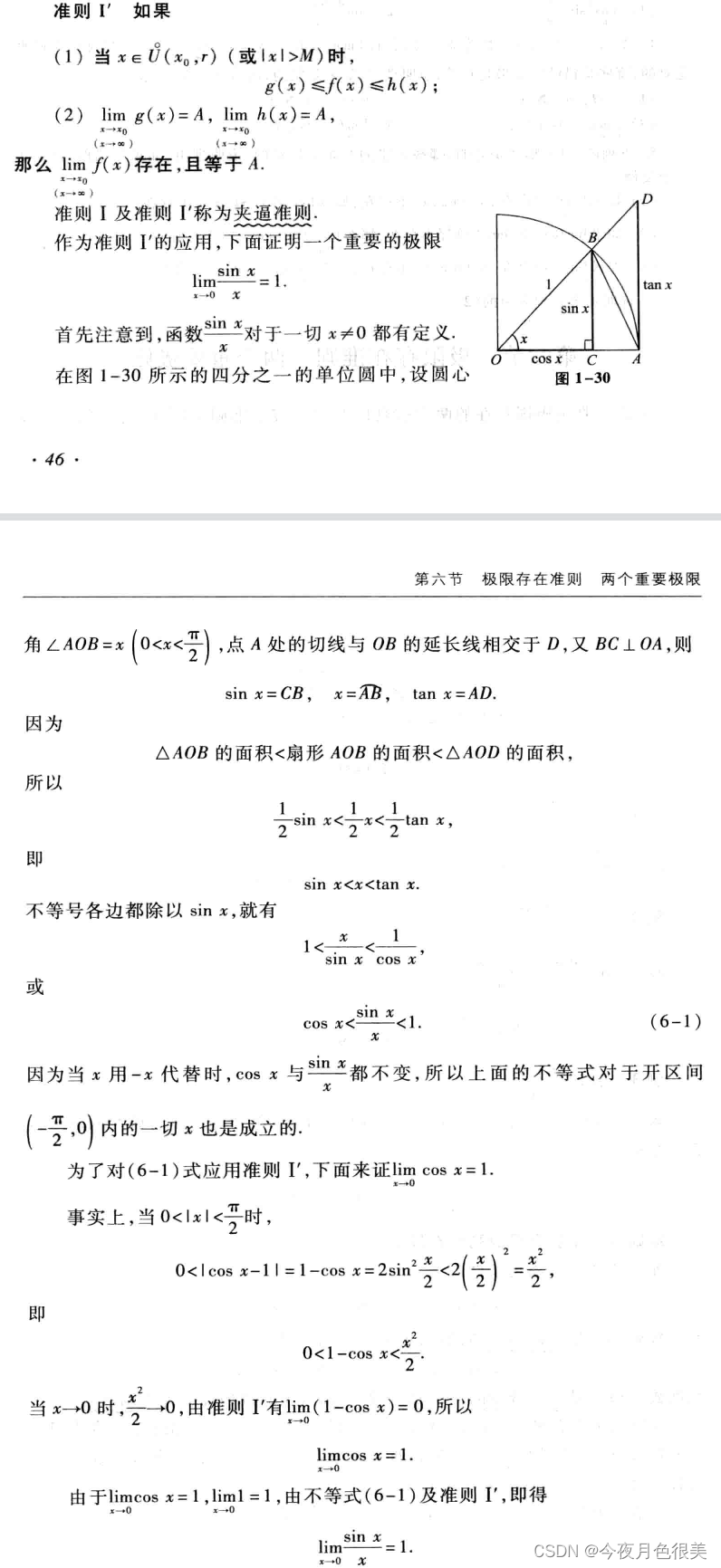
2、两个重要极限
2.1、重要极限一
2.2、重要极限之二
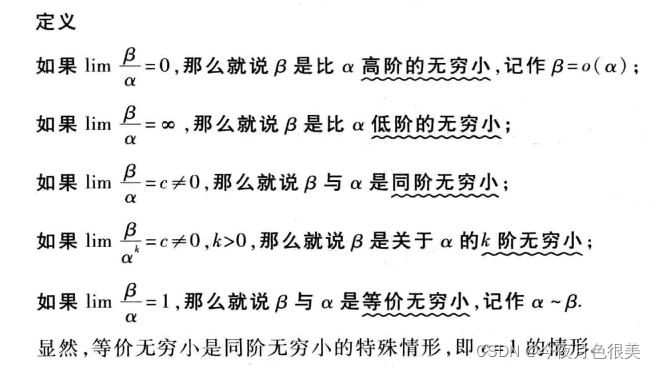
3、无穷小的比较

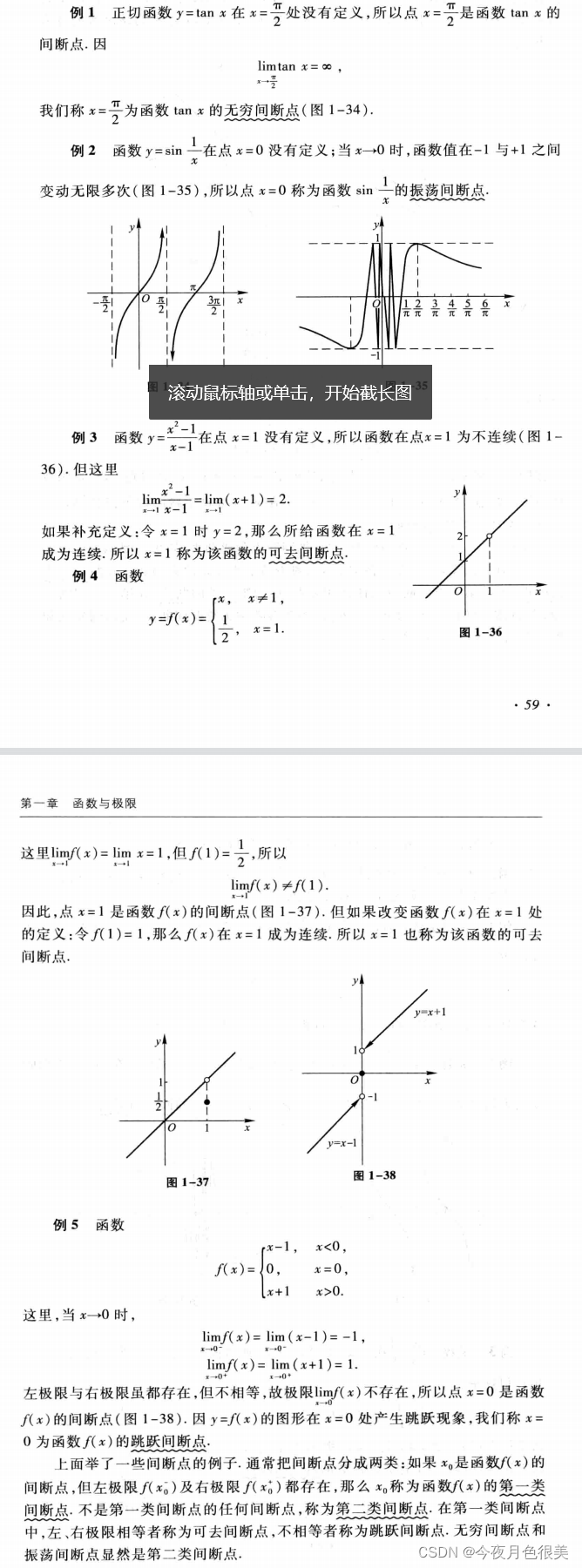
4、函数的连续性与间断点
5、备注
连续的几何含义是一笔画,可导的几何含义是光滑

















 1503
1503

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









