






目录
2.5 统一理论视角下的“可调旋钮”:σ、d0、S、x与漏电
3.4 自立式摩擦电层模式:用“运动的带电层”驱动双电极感应
4.2 介电与电容工程:d0与C(x)决定了“电荷能转多少”
4.3 结构级增强:分段电极、阵列化与多层堆叠的“尺度效应”
4.4 稳定性与重复性:把“电荷衰减”当成理论问题而不是实验偶然
4.5 把增强策略收束成“理论增益表”:每一招到底提升了哪一个参数
参考文献:Udofa, E.S., Mohamed Ali, M. & Leow, P.L. Recent development in triboelectric nanogenerators: a review. J Mater Sci: Mater Electron 37, 6 (2026). https://doi.org/10.1007/s10854-025-16223-7
1 引言
当我们讨论“把环境中的机械能变成电能”时,真正的难点并不在于机械能是否存在,而在于机械能的形式往往是低频、随机、幅值不稳定且分布式的:人体动作、设备振动、旋转扰动、风致摆动、水面波动乃至声学压力波都具备明显的“弱、散、慢”的特征。传统的电磁发电在高频与大位移场景里效率突出,但在柔性、小型与低频条件下会遇到结构体积、线圈磁体匹配与可靠性等约束;压电能量转换对材料体系与工作模态较为敏感,且在低频大变形场景里往往需要额外结构放大。摩擦电纳米发电机(Triboelectric Nanogenerator, TENG)之所以在过去十余年内发展迅速,核心原因在于它把“接触起电(摩擦带电)”与“静电感应”这两类人类早已熟悉却长期被视为负面效应的物理过程,重新组织成一套可工程化的能量转换链路:机械运动驱动界面电荷生成与分离,时变电场通过静电感应在电极中驱动电荷流动,从而在外电路形成可用电能。这个链路的本质是电容系统的时变问题,因此天然适配低频输入,也能通过材料选择、界面微结构与电极拓扑实现非常多样化的器件形态。
为了让后续讨论不陷入“只看结构不看机理”的碎片化描述,最有必要先把TENG看成一个统一的物理系统:它至少包含两类电荷(界面摩擦电荷与电极自由电荷),至少包含一个随机械位移变化的等效电容/耦合电容网络,并且输出电压、电流与功率都同时受到表面电荷密度、有效间隙、介质等效厚度、面积、运动频率、负载阻抗与漏电路径的共同制约。基于这种统一视角,再去理解四种经典工作模式(垂直接触-分离、面内滑动、单电极、自立式摩擦电层)及其性能增强策略,才能把“现象级描述”转为“参数级解释”,最终把设计问题落到可计算、可比较的理论框架上。

2 理论知识与技术基础
2.1 接触起电的物理图景:从界面电子交换到宏观面电荷
接触起电并不是“摩擦才有电”,更精确的说法是:当两种材料表面在微观尺度发生真实接触时,界面处存在的电子能级差、表面态与局域化陷阱态会驱动电荷重新分布;当两者随后分离,这种重新分布在宏观上表现为两表面带等量异号的电荷。摩擦在很多情况下只是帮助“更充分接触”和“更频繁接触-分离”的机械手段,因此同样的材料对在接触-分离或滑动中都能产生摩擦电荷。工程上常用一个最关键的宏观参数来表征这一结果:表面电荷密度 σ(单位C/m²)。一旦把界面带电简化为“在接触界面形成±σ,且在短时间内可视作固定不动的表面电荷”,大量复杂的微观过程就可以在器件建模中被等效吸收,后续输出分析也就转化为静电场与电容网络的时变问题。
需要强调的是,σ并不是一个“只由材料名字决定”的常数。它会受到真实接触面积、表面粗糙度与微纳纹理、界面吸附水层、环境湿度、温度、材料的介电常数与电荷俘获能力、以及电荷复合/泄漏路径等因素显著影响。很多看似“材料更强”的结果,本质上可能来自更高的有效接触面积或更低的表面漏电;而很多“性能衰减”,在理论上对应的是表面电荷随时间或随循环数的衰减(电荷保持能力不足)。因此,在理论层面讨论TENG性能增强时,最重要的不是背材料清单,而是始终围绕“如何提高有效σ并让其稳定存在”这一主线展开。
2.2 静电感应与位移电流:TENG输出电流的根本来源
TENG外电路中的电流,本质不是“摩擦直接产生电流”,而是时变电场通过静电感应驱动电极自由电荷重新分布的结果。把这一点写成电磁学语言,就是位移电流项在宏观电路中的体现。经典形式为:
$$\nabla \times \mathbf{H}=\mathbf{J}+\frac{\partial \mathbf{D}}{\partial t}$$
这里,H为磁场强度,J为传导电流密度,D为电位移矢量。对介质而言:
$$\mathbf{D}=\varepsilon_{0}\mathbf{E}+\mathbf{P}$$
其中E为电场强度,ε0为真空介电常数,P为极化强度。对TENG而言,机械运动导致界面带电分离与空间电场分布随时间变化,从而使D的通量随时间变化。将其对电极有效面积积分并对时间求导,就得到外电路电流的统一表达:
$$I=\frac{dQ}{dt}=\frac{d}{dt}\int_{S}\mathbf{D}\cdot d\mathbf{S}$$
这里I是外电路电流,Q是电极间可转移的自由电荷量,S是等效参与耦合的面积。这个表达式非常关键,因为它告诉我们:只要结构能让电场分布随时间变化,就可以产生输出;而电场变化的速度(与位移速度相关)、变化幅度(与σ、结构尺度相关)与耦合面积(与S相关)共同决定了电流幅值。这也解释了为什么TENG通常呈现“高电压、相对低电流”的特征:表面电荷能产生很高的电势差,但电荷转移速率与可转移总量受到电容与阻抗限制。
2.3 可变电容模型:把机械位移映射为V–Q–x关系
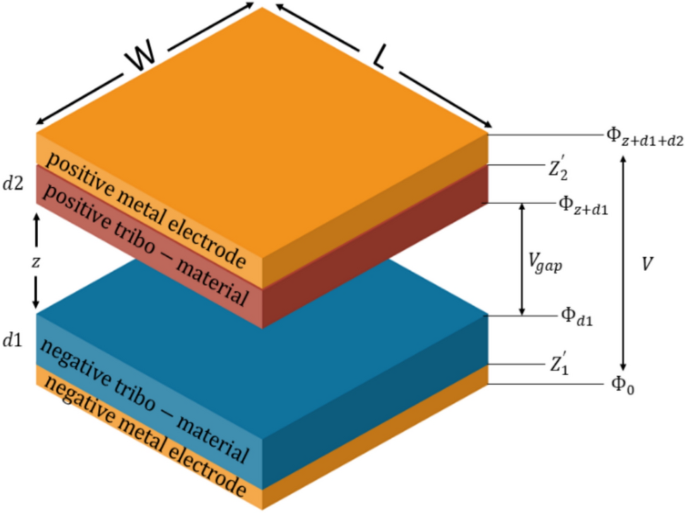
把TENG看成一个可变电容系统,是最常用也最容易工程化的理论框架。以最典型的垂直接触-分离结构为例,两层介质背后贴附电极,接触后界面形成±σ,随后分离距离为x。将两层介质的厚度与介电常数折算为等效介质厚度 d0:
d0 = d1/εr1 + d2/εr2(如果只有一层介质,则简化为 d0 = d/εr)
则随分离距离变化的等效电容可写为:
$$C(x)=\frac{\varepsilon_{0}S}{x+d_{0}}$$
在此基础上,电极间电压与转移电荷Q的关系可写成一个非常具有“统一性”的形式:
$$V(x,Q)= -\frac{Q}{C(x)}+V_{oc}(x)= -\frac{Q(x+d_{0})}{\varepsilon_{0}S}+\frac{\sigma x}{\varepsilon_{0}}$$
这里V是两电极间端电压,Q是外电路已转移的自由电荷量(可理解为电极上等量异号的感应电荷),σ是界面摩擦电荷密度,x是机械分离距离,S是有效面积。这个式子的重要性在于:它把材料(σ、εr)、几何(S、d0)、运动(x(t))与电学变量(V、Q)直接耦合在一起,使得“结构怎么变、输出怎么变”可以被定量追踪。
由上述关系可以直接得到两个极限状态。开路(外电路断开)时,电荷无法转移,Q≈0,于是:
$$V_{oc}(x)=\frac{\sigma x}{\varepsilon_{0}}$$
短路(两电极外接近似零电阻)时,电压被钳制为V≈0,于是:
$$Q_{sc}(x)=\sigma S\frac{x}{x+d_{0}}$$
这两条表达式在后文会反复出现:它们告诉我们开路电压主要受x和σ控制,而短路转移电荷不仅受σ与面积S控制,还受到等效厚度d0与间隙x的共同制约。换句话说,想要提升电压与想要提升可转移电荷,理论抓手并不完全相同,这也是很多“电压很高但功率不一定大”的现象背后的根本原因。
2.4 输出指标与负载匹配:从瞬态波形到平均功率
TENG输出往往是随运动周期变化的交流信号或脉冲信号。理论上最常用的指标包括开路电压Voc、短路电流Isc、转移电荷量Q以及在特定负载电阻R下的输出功率。对于任意时刻,若负载为电阻R,则瞬时功率为P(t)=V(t)²/R,周期平均功率为:
$$P_{avg}=\frac{1}{T}\int_{0}^{T}\frac{V^{2}(t)}{R},dt$$
其中T为机械周期。由于TENG通常具有较高输出阻抗,因此功率随R并非单调变化,而存在一个“匹配区间”。从可变电容模型角度看,器件的等效输出阻抗与电容变化率、运动频率以及电荷转移动力学有关;当R过小,电压被压低但电流增大,器件可能更像电荷泵;当R过大,电荷转移被抑制,电压虽高但实际输出能量有限。工程设计中常见的整流-储能-稳压链路,本质就是在把“高压高阻的交流源”变为“可用的直流供能”,但在讨论理论时,关键仍然是理解V–Q–x关系与R共同决定了电荷转移轨迹Q(t),从而决定了V(t)与能量输出。
2.5 统一理论视角下的“可调旋钮”:σ、d0、S、x与漏电
把前述模型收束到可操作的设计变量上,可以把TENG输出理解为几个“旋钮”的共同作用:其一是表面电荷密度σ,它决定了系统能“建立多强的驱动力”;其二是有效面积S,它决定了在同样电场与同样电荷密度下可转移电荷的总量;其三是等效厚度d0与间隙x,它们一起决定了电容C(x)以及短路转移电荷的饱和值;其四是运动学量x(t)与其变化速率dx/dt,它们决定了电场变化的速度与位移电流大小;其五是泄漏与电荷保持,它决定了σ是否能在一个足够长的时间尺度内维持,从而让周期性输出能够持续。任何“结构创新”如果无法在这些变量上产生可解释的增益,最终很难在功率或稳定性上形成真正的提升;反过来,只要能对这些变量施加有效控制,就能把各种花样繁多的器件方案放进同一个理论坐标系里比较。
3 四种基本工作模式的机理与统一建模框架
3.1 垂直接触-分离模式:最直观的电容变化型TENG
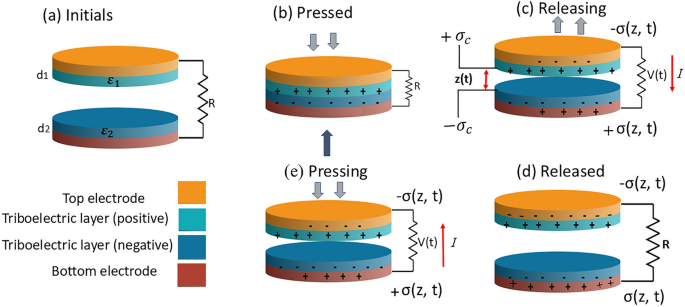
垂直接触-分离模式可以被视为TENG中“最像电容器”的一种:两块携带摩擦层的结构在法向方向周期性接触并分离,界面在接触时完成电荷交换,在分离时形成电场并驱动电极自由电荷通过外电路迁移。其典型结构是两电极分别贴附在介质背面,当两摩擦层接触时,界面带上±σ,电极内部电荷重新分布以满足导体等势;当外力使两层分离,带电界面间隙增大,电势差随x增大而增大,外电路若闭合,电子将从一个电极流向另一电极以抵消部分电场,从而产生电流。随后当结构再次压合回去,电势差减小,电子将反向流动,形成交流输出。这个过程之所以能在低频下产生明显输出,是因为在相对较慢的位移变化下,电容C(x)依然发生可观变化,而表面电荷σ提供了足够大的静电驱动力。
如果把这一过程放进V–Q–x模型里,外电路闭合意味着Q将沿着由负载R决定的动态路径演化。尽管严格求解需要写出微分方程(将V(x,Q)与I=dQ/dt及V=IR联立),但在理解层面可以抓住两点:第一,开路电压随x线性增长(Voc=σx/ε0),因此“拉开距离”能显著提高电压;第二,短路转移电荷Qsc存在饱和(Qsc=σS·x/(x+d0)),因此当x远大于d0时再继续增大x,对可转移电荷的提升会变得越来越有限。由此可以解释一些常见现象:比如增大间隙能使电压飙升,但若有效面积与σ不变,功率未必同比例增长;又比如提高介质厚度d会增加d0,从而降低同一x下的Qsc,使得器件更“高压高阻”,这对某些需要高电压触发的场景有利,但对直接驱动负载并不一定最优。
3.2 面内滑动模式:重叠面积变化带来的电荷转移
面内滑动模式的关键不是“间隙变化”,而是“重叠面积变化”或“界面相对位置变化”。当两层摩擦材料在面内方向发生相对滑动时,接触起电在界面同样形成±σ,但由于电极与带电区域的相对重叠关系在变化,电极上感应电荷的分布会随滑动位移发生重排,从而驱动外电路电荷往复流动。与接触-分离相比,滑动模式更容易实现连续的周期性位移(例如往复滑块、滚动/旋转结构的展开),同时它也更容易通过电极分段、栅格化或周期性条纹电极来实现更高频率的电荷转移,从而在相对较小的机械位移下获得较高的电输出频率。
从理论上看,滑动模式可理解为“等效电容网络随重叠函数A(ξ)变化”,其中ξ为滑动位移。若将有效重叠面积写成S(ξ),那么在最简化的近似下,转移电荷量与重叠面积变化呈正相关,电压驱动力与界面电荷密度σ相关。更精细的模型会引入边缘场与非均匀电势分布,但工程上最有用的结论依然是:通过做周期性电极与周期性结构,可以把较慢的机械运动映射为较快的电输出变化;同时,滑动模式对界面磨损、摩擦热与材料耐久性的要求也更高,因为其本质是“持续的切向相对运动”,界面机械可靠性会直接影响σ的稳定性与输出一致性。
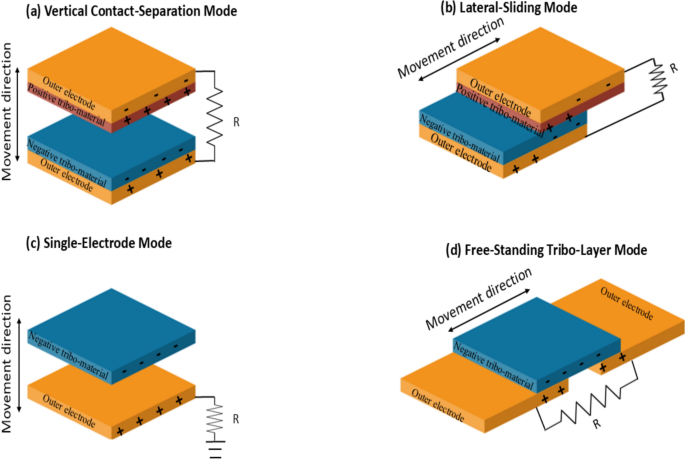
3.3 单电极模式:把“参考端”交给环境或地
单电极模式的思想非常工程化:在很多场景里,很难在两侧都布置电极并保证可靠连接,例如人体皮肤、柔性可穿戴、与大面积环境接触的结构等。单电极模式让器件只在一侧设置电极并连接外电路,另一侧不再强制配置对电极,而是把电势参考端交给环境(地)或一个大的等势体。其输出来自于摩擦层与环境之间的接触起电与分离造成的电势变化,从而驱动单侧电极与地之间的电荷交换。这个模式的优势在于结构自由度极高,尤其适合“人体/物体与环境交互”的场景;但从电学角度看,它引入了一个更复杂的耦合电容:电极与地之间的电容、摩擦层与地之间的电容、以及环境电势波动都会参与其中,因此输出会更依赖具体场景的电磁环境与接地条件。
在理论上,单电极模式依然可以用V–Q–x框架描述,只是“另一电极”被替换为“地参考”,而器件的有效电容不再是简单的平行板形式,而更像是随距离变化的分布电容。直觉上可以这样理解:当摩擦层靠近或接触单电极一侧时,界面形成电荷并使单电极附近电势发生变化;当它远离时,电势回落,外电路电荷来回补偿这种变化,从而形成输出。由于耦合电容较小且路径更分散,单电极模式的输出阻抗往往更高,但它的“可用性”很强,能在很多复杂形变与开放结构中工作,这是其他模式很难替代的。
3.4 自立式摩擦电层模式:用“运动的带电层”驱动双电极感应
自立式摩擦电层模式(freestanding triboelectric-layer mode)通常被视为更适合实现高效率电荷转移与更灵活电极布置的一类方案。它的典型结构是:带电的摩擦层作为“可移动的自立层”在两组固定电极上方/之间移动,电极不必与摩擦层直接绑定。移动的带电层在不同电极上方时,会导致两电极之间的电势差发生变化,从而驱动外电路电荷从一电极流向另一电极。由于电极的几何形状可以做成周期性分段(例如交指电极、栅格电极、弧形阵列电极),自立式模式非常容易与旋转运动结合,把机械旋转直接转换为高频交变电输出,这也是它在旋转能量采集、滚动结构与大面积“自由运动层”场景里常被采用的原因。
从建模角度看,自立式模式可被视作“带电层在不同电极之间移动引起耦合电容矩阵变化”,其核心驱动力仍然是σ与几何耦合。相较于接触-分离模式的“间隙改变电容”,自立式模式更强调“电荷分布位置改变电势”,因此在保证σ足够且运动轨迹可控时,输出往往更稳定、更适合连续发电。同时,这一模式也把“摩擦层磨损”与“电极导线连接”解耦:电极固定在基底上,运动层可以是更易更换或更耐磨的材料组合,这在系统可靠性上具有明显优势。
3.5 模式统一:用一张表把结构差异压缩为参数差异
四种模式表面看起来结构差异很大,但在统一理论框架下,它们的共同点是:界面生成的摩擦电荷提供σ,结构运动改变电场分布与等效电容/耦合电容,外电路通过静电感应实现Q的转移。差异主要体现在“哪一个几何量在变化(间隙x、重叠面积S(ξ)、耦合矩阵Cij)”以及“参考电势与电极布置方式”。把这些差异压缩成工程语言,最实用的方式就是参数化对比:哪种模式更容易做大面积、哪种模式更适合低频大位移、哪种模式更便于与旋转/滑动结合、哪种模式对接地与环境更敏感。为了避免清单式描述,下面用表格把关键信息集中呈现,后续章节会在此基础上展开解释与推导。
| 模式 | 主要机械自由度 | 典型电极配置 | 主要可变参数 | 输出特征的理论直觉 | 适配场景的物理原因 |
|---|---|---|---|---|---|
| 垂直接触-分离 | 法向接触/分离 | 双电极贴附在两侧介质背面 | 间隙x(t)、等效厚度d0、面积S、σ | Voc随x近似线性增大,Qsc随x趋于饱和;高压高阻明显 | 低频、周期性按压/振动;易获得较大x变化 |
| 面内滑动 | 切向滑移/相对位移 | 双电极+滑动摩擦层 | 重叠面积S(ξ)、边缘场、σ | 输出由电荷分布位置变化驱动;易做栅格电极提升频率 | 往复/旋转转化;小位移可换高频电输出 |
| 单电极 | 任意靠近/离开或接触/分离 | 单侧电极+地参考 | 与地耦合电容Cg(x)、σ、环境电势 | 结构最自由但阻抗更高;输出依赖耦合路径 | 可穿戴/开放结构;另一侧无法布电极 |
| 自立式摩擦电层 | 带电层相对电极移动 | 固定双电极+移动带电层 | 耦合电容矩阵随位置变化、σ、分段电极周期 | 适合连续运动;电极固定有利于稳定输出 | 旋转、滚动、连续滑动;易实现阵列化与规模化 |
4 输出增强的核心变量与结构策略:从σ到系统能量流
4.1 提升表面电荷密度σ:材料选择之外更关键的是电荷保持
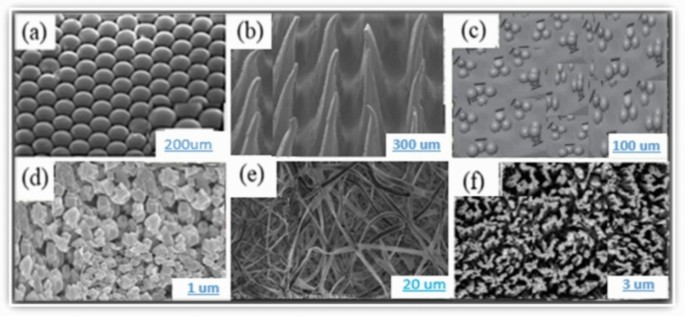
在理论模型里,σ几乎出现在所有关键公式的“最前面”:Voc与σ成正比,Qsc与σ成正比,很多时候功率上限也受σ约束。因此任何性能增强策略都可以被追问一句:它是否提高了有效σ,或者是否让σ在更长时间尺度内保持?材料选择当然重要,因为不同材料的电子亲和性、表面态密度与电荷俘获能力不同,会导致接触后可形成的电荷量不同;但仅靠“换材料”往往无法解释所有现象,因为真实输出更多取决于“有效接触面积×可形成的面电荷密度×电荷不被泄漏掉的能力”。这也是为什么很多研究会采用表面微纳结构来提升有效接触、采用高介电/高陷阱密度层来增强电荷俘获、采用封装隔绝水汽来降低表面电导,从而在不改变宏观材料体系的情况下显著提高输出。
从电学角度看,电荷保持能力可以用“漏电等效电阻Rleak”和“等效电容C”形成的时间常数来直观理解:τ≈Rleak·C。若环境湿度或表面污染导致Rleak变小,τ减小,σ在一个周期内就会衰减,表现为输出快速下降;相反,若封装与材料表面处理让Rleak变大,σ可以在更多周期内维持,输出就更稳定。理论上这并不复杂,但它要求设计者把“材料学指标”转换成“电学泄漏路径”,并在结构层面避免给漏电提供捷径,例如边缘电场集中处的表面放电、界面吸附水层形成的离子导电等。
4.2 介电与电容工程:d0与C(x)决定了“电荷能转多少”
很多人会直觉认为“介质越厚越好”,因为厚介质能承受更高电压、还能更耐磨,但从Qsc表达式可以清楚看出:d0越大,在同一分离距离x下,Qsc=σS·x/(x+d0)越小,这意味着可转移电荷减少,等效输出阻抗增大,器件更偏向“高压低流”。因此,厚介质带来的好处(耐久、耐压、结构强度)与其代价(d0增大导致电荷转移受限)之间存在必须权衡的理论矛盾。解决这种矛盾的思路通常不是简单变薄,而是通过提高介电常数εr来降低等效厚度d0=d/εr,或者通过多层结构把“承力层”与“电学有效层”分离:机械强度由外层提供,而电学耦合主要由高εr、低损耗的内层承担。这样在保持耐久的同时,依然可以在电学上获得较小的d0,从而提升Qsc与可输出能量。
从能量角度看,TENG每个循环输出能量可以表示为Q–V平面上的环路积分:
$$W=\oint V,dQ$$
这个表达式提醒我们:不是“电压高”或“电荷多”单独决定能量,而是两者如何在一个循环中共同演化决定环路面积。通过减小d0提高电荷转移上限、通过合理的运动轨迹x(t)与电路条件改变Q(t)轨迹,最终体现为环路面积增大。很多所谓“结构优化”的本质,就是在改变Q–V环路形状,让同样的σ在周期内做更多有效电功。
4.3 结构级增强:分段电极、阵列化与多层堆叠的“尺度效应”
在不改变单元σ的前提下,要提高输出功率,最直接的思路是扩大有效面积S或提高单位时间内的有效循环次数。前者对应大面积器件与阵列化集成,后者对应提高输出频率或在一次机械输入中触发更多电荷转移事件。这里分段电极与周期性结构是一个典型手段:特别是在滑动模式与自立式模式中,通过做栅格、交指或径向电极阵列,可以让一个旋转周期内发生多次电势反转,等效提升电输出频率,从而在相同转速下得到更连续的电流输出。对于旋转结构,理论上可把“输出频率”理解为“电极周期数×机械旋转频率”,因此电极周期密度提升往往能显著提高电输出的频谱密度与平均功率。
在公开综述的实例中,存在一种基于自立式摩擦电层模式的旋转结构:由转子与定子组成,采用径向阵列的精细电极。在大约500 r/min的旋转条件下,短路电流可达到mA级量级,并且输出频率可以达到数百Hz量级,这说明当结构把“连续旋转”映射为“高频电荷转移”时,TENG并不必然只能输出微安级电流。理论上,这类结果来自两个因素叠加:一是电极分段使得单位时间内的dQ/dt增大,二是自立式模式让电极固定、耦合稳定,从而减少了非理想接触导致的σ波动。把这些解释回到I=dQ/dt的核心式子,就很清晰:让Q在更短时间内完成更大幅度变化,电流自然上升。
4.4 稳定性与重复性:把“电荷衰减”当成理论问题而不是实验偶然
TENG最常被诟病的并不是“做不出高峰值”,而是“峰值能不能保持”和“不同环境下是否一致”。理论上这可以被拆解成两个层面:电荷生成是否饱和(σ是否达到稳定上限),电荷是否随时间泄漏(σ(t)是否快速衰减)。第一层面往往与材料表面态与接触质量相关,第二层面更多与表面电导、吸湿与边缘放电相关。若把泄漏建模为并联的漏电电阻Rleak,则在等效电路中,TENG可被视为“理想电荷源/电压源+可变电容+漏电支路”的组合;当Rleak较小,输出端电压会被漏电支路钳制,表现为开路电压也不再能达到理论值,功率曲线也会整体下移。因此,稳定性并不是“封装做不做”的工艺细节,而是决定模型是否成立的边界条件:只有当Rleak足够大、σ近似可视作固定时,前述V–Q–x公式才具有工程可预测性。
4.5 把增强策略收束成“理论增益表”:每一招到底提升了哪一个参数
为了避免“策略罗列”导致的碎片化理解,可以把常见增强手段按其作用对象归类为“提升σ”“降低d0/优化C”“提升有效S”“提升dQ/dt”“降低泄漏”。把这一归类写成表格后,很多看似不同的方案会在理论层面归并到同一种增益机制,这对读者在新场景下快速迁移设计思路非常有用。
| 增强手段的工程表现 | 理论上主要提升的量 | 对Voc的影响 | 对Qsc/电流的影响 | 典型代价或风险的理论解释 |
|---|---|---|---|---|
| 表面微纳结构、粗糙化、纹理化 | 有效接触面积→有效σ↑或S↑ | 往往上升(σ↑) | 上升(σ↑、S↑,且接触更充分提升dQ/dt) | 结构尖端电场集中可能增加放电与磨损 |
| 高介电常数/复合介质层 | d0↓、C↑ | 对Voc表达式影响不一定直接,但可改善负载下电压保持 | Qsc上升(x/(x+d0)增大),电流提升 | 介质损耗与漏电可能降低Rleak |
| 分段电极、栅格/径向阵列 | dQ/dt↑、有效频率↑ | 峰值不一定变,但平均输出更连续 | 平均电流与功率上升 | 电极间隙小会引入寄生电容与击穿风险 |
| 多层堆叠、阵列化集成 | S↑或单元数N↑ | 电压可串联提升(视连接方式) | 电流/电荷可并联提升(视连接方式) | 一致性由σ分布与同步性决定,易受失配影响 |
| 封装、疏水处理、边缘电场管理 | Rleak↑、σ保持↑ | 长时间稳定接近理论Voc | 输出衰减变慢,平均功率显著提升 | 可能牺牲柔性或增加机械阻尼导致x(t)减小 |
5 混合化纳米发电:互补机理与系统级等效
5.1 为什么需要混合:从阻抗互补到能量谱互补
单一类型的能量采集器往往存在明确的“优势频段与优势阻抗区间”。TENG通常输出高电压但电流较小、阻抗较高,特别适合低频、随机、幅值较大的机械扰动;电磁发电(EMG)更擅长在相对高频或持续旋转下输出较高电流,阻抗较低;压电发电(PENG)在材料与结构合适时对动态力敏感,能够输出较高电压与相对适中的电流。混合化的理论价值并不只是“把两个输出相加”,而是用互补的阻抗与频谱特性,让系统在不同输入条件下都能保持较高的能量捕获效率,从而提高平均可用功率与供能稳定性。换句话说,混合系统应该被看成一个“多源能量路由网络”:不同转换机制在不同工作区间贡献不同的能量份额,整流与储能把它们统一到直流端,最终面向负载呈现更稳定的能量流。
为了把这种互补写得更“理论化”,可以把不同发电器看成具有不同的等效源与内阻:TENG更接近电荷源/高内阻电压源,EMG更接近电流源/低内阻电压源,PENG介于两者之间且对频率响应更敏感。系统层面的关键问题就变成:如何通过整流、变换与储能,使得每个源都在自己的优势阻抗区间工作,而不是被其他源“拖着跑”。因此,混合化的讨论如果只停留在“两个器件放一起”,就失去核心;必须落到等效电路与能量管理的可解释框架里。
5.2 电磁-摩擦电混合:高电压与高电流的互补组合
公开综述中描述过一种具有代表性的电磁-摩擦电混合方案:结构上包含线圈与磁体形成的电磁单元,同时也包含可发生接触-分离与滑动的摩擦电单元;机械扰动使得结构内部发生相对运动,一方面改变磁通量在线圈中感应出电压电流,另一方面改变摩擦电界面间的电场分布产生TENG输出。理论上这类方案的优势非常直观:TENG端能提供更高电压以克服整流与储能的阈值,而EMG端能提供更高电流以提高充电速率;当两者在整流后汇聚到储能端时,系统平均功率可显著提升。此外,由于两者的输出阻抗差异很大,实际测量与电路连接中往往需要变压器或特定阻抗变换以保证比较与汇合的合理性,这本质上仍然是“让源在合适的负载上工作”的问题。
把这一类混合系统抽象为等效电路,可以写成“两个交流源分别经整流后并联到同一储能电容/电池”,其总充电功率近似可写为Ptotal≈PTENG+PEMG(忽略耦合损耗)。但更真实的情况是:两路能量在整流器上有不同的导通条件,且储能端电压会反过来影响两路源的工作点。因此,理论上应把整流器与储能端视为非线性边界条件,分析每一路源在不同储能电压下的能量传递效率。虽然这一步在工程上常靠电路仿真完成,但理解上只需记住:混合化的目标是拓宽有效能量捕获窗口,而不是让两路源彼此“竞争”同一个不合适的负载。
5.3 光伏-摩擦电与其他混合:不同能量类型的时域互补
除机械能内部的不同机制互补外,另一类常见思路是把机械能采集与光能采集结合。光伏(太阳能电池)输出相对平滑,适合在光照条件下提供持续功率;TENG可以在无光或光照不足时通过运动补偿供能,并且对瞬态机械扰动非常敏感。公开综述中给出过一种混合能量单元:将硅基太阳能电池与TENG通过整流桥等电路连接,使两者输出在直流端汇合,并展示了对锂离子电池充电的过程曲线。理论上这种混合的核心价值并不在于“峰值多高”,而在于把不同环境条件下的能量可得性叠加,使得储能端获得更高的能量供给连续性。
从电路理论看,光伏端更像“带最大功率点约束的非线性电压源”,TENG端更像“受运动驱动的高内阻交流源”。两者并联到同一储能端时,必须避免互相牵制:例如储能端电压过高会让光伏远离最大功率点,也可能导致TENG在整流阈值以下难以有效传能。因此,混合系统往往需要某种形式的功率管理策略(哪怕是最简单的二极管隔离或分时控制)来保持各自的工作点合理。即便不深入电路细节,只要抓住这一点,就能理解为什么混合系统的性能评估不能只看“开路电压/短路电流”,而必须看在特定储能电压下的实际能量传递效率。
5.4 以理论方式理解能量管理:整流、储能与“能量门槛”
对于TENG而言,能量管理电路并不是附属品,而是决定“能不能把高压高阻输出变成可用电能”的关键环节。理论上最基本的问题是整流门槛:二极管需要一定导通电压,且整流后储能端电压会逐渐升高,这会提高后续能量注入的难度。若把TENG简化为随时间变化的等效源V(t)与内阻Zint(t),则当V(t)的峰值不足以超过“储能端电压+整流压降”时,能量几乎无法注入储能端;只有当V(t)足够高时,才会出现脉冲式充电。因此,在理论上想提高“可用能量”,除了提高峰值外,还可以通过降低整流损耗、采用同步整流、或通过电荷泵/开关电容结构改变能量传递方式来降低门槛。这些电路策略的细节可很深,但其物理本质仍然可以回到前文的Q–V环路:电路在改变环路轨迹,使得同样的σ与运动能转化为更大的有效环路面积。
| 能量管理环节 | 对理论量的影响对象 | 直观作用 | 在模型里的等效理解 |
|---|---|---|---|
| 整流 | 有效输出电压门槛、能量单向化 | 把交流/脉冲变成可储能直流 | 引入非线性边界条件,限制Q(t)轨迹 |
| 储能电容/电池 | 端电压随时间抬升 | 平滑输出、积累能量 | 端电压变化改变负载工作点 |
| 阻抗变换/变压 | 等效负载映射 | 让源在更合适阻抗区工作 | 改变V–I关系,提升能量转移效率 |
| 开关电容/电荷泵 | 提升有效传能与门槛适配 | 在高阻源条件下提高注入效率 | 改变Q–V环路形状与面积 |
6 典型机械能场景下的物理建模与器件范式
6.1 振动能量:小位移、高循环与结构共振的作用
振动能量采集的难点在于位移往往很小但循环次数多,输入能量频谱可能较窄也可能很宽。对于TENG而言,若输入位移幅值不足以产生足够的x变化或重叠面积变化,则需要通过结构设计放大运动,比如利用弹簧-质量块结构、柔性梁结构或共振结构把外界加速度转化为更大的相对位移。理论上,这相当于把机械系统的传递函数H(ω)叠加到电学模型中:x(t)不再等于外界位移,而由结构动力学决定;当结构在某频率附近共振时,x幅值显著增大,Voc随之增大,Qsc也随之提升,输出功率明显提高。换句话说,在振动场景里,电学模型的关键输入量是x(t)与dx/dt,而机械结构的任务就是在目标频段内把它们做大、做快,同时避免过度阻尼导致位移被抹平。
同时,振动场景也非常考验电荷保持与耐久性:高频循环会加速界面磨损与电荷衰减,因此理论上必须在“提高σ的接触强度”和“降低磨损保持稳定σ”之间寻求平衡。很多结构会采用弹性接触材料、缓冲层或非完全摩擦的接触方式,以在保持足够接触起电的同时减少磨耗。这些选择最终都会在模型中反映为σ的有效上限与随循环数的衰减速度,因此振动能量采集的理论评估应该同时包含“单周期输出能量W”与“随时间的稳定性W(t)”,而不是只看初始峰值。
6.2 旋转能量:把连续运动映射为高频电输出
旋转能量是一类非常典型的“连续、可稳定输入”的机械能形式。TENG在旋转场景下往往采用滑动或自立式模式,通过分段电极把旋转角度映射为电势差周期性反转,从而输出频率可与电极分段数成正比。公开综述中的实例已经说明:在几百转每分钟的转速下,借助精细径向电极阵列,自立式模式的输出频率可达到数百Hz,短路电流可达到毫安量级。这一点在理论上非常重要,因为它打破了“摩擦电只能微电流”的刻板印象,说明电流大小并不只是由σ决定,还高度依赖于结构能否实现快速、重复的电荷转移事件(dQ/dt)。在旋转场景里,电极分段相当于提高了单位时间内的电荷翻转次数,因而电流上升。
如果用公式把这种“频率映射”写得更明确,可以把输出电荷变化近似写为Q(t)=Q̂·sin(2πfout t),则电流幅值Î=2πfout·Q̂。这里fout≈N·fmech,N为电极周期数,fmech为机械旋转频率。这个简单关系并不用于精确计算,但它给出了强烈的设计直觉:在不显著牺牲Q̂的前提下,提高输出频率会直接推高电流幅值与平均功率。当然,N过大也会带来电极间距变小、寄生电容与击穿风险上升等问题,因此最终仍需在电场强度、介质耐压与机械加工极限之间权衡。
6.3 人体运动:低频大形变与单电极/接触-分离的优势
人体运动的典型特征是频率低(常在数Hz以内)、形变大但不规则、且对舒适性与柔性要求极高。理论上,低频并不妨碍TENG工作,因为输出来自位移电流而不是电磁感应的高频变化;更关键的是如何在柔性条件下仍然保证足够的接触起电与有效分离位移,从而获得足够的Voc与Qsc。接触-分离模式在人体按压、踩踏等场景中很直观;单电极模式则在“人体与环境交互”中更易实现,因为很多时候无法在对侧布置固定电极或保证可靠连接。人体场景下的输出理论评估常常需要把接触力-位移关系纳入模型:柔性材料的压缩会改变真实接触面积,从而改变有效σ;恢复过程决定了x(t)的轨迹,因此也决定了输出波形与能量环路面积。换句话说,同样一个“材料对”,在不同的柔性支撑与不同的力学结构下,σ与x(t)都会不同,输出差异可能远大于材料差异。
此外,人体场景对稳定性尤为敏感:汗液、湿度、皮肤油脂会显著降低表面电阻并引入离子导电,从而降低Rleak使输出衰减更快。因此理论上如果不处理“漏电”,即便初始σ很高,输出也可能在短时间内下降到很低。封装、疏水表面、可呼吸但隔水的结构层在这里并非“可选优化”,而是让模型假设(σ近似保持)成立的必要条件。
6.4 风能:振动-摆动-转动的耦合与非定常输入
风能采集往往通过旗帜摆动、叶片旋转、涡激振动等方式把流体动能转化为结构运动。对TENG来说,这些运动的共同点是具有明显的非定常性:风速变化会导致频率与幅值变化,且可能存在阵风带来的冲击。理论上这意味着x(t)或重叠函数S(ξ)是一个非平稳过程,输出信号也会随之非平稳。若以能量角度评估,关键不是瞬时峰值,而是长时间平均能量输出与能量管理的匹配:在风速较低时TENG输出可能不足以突破整流门槛,而在阵风时又会产生高峰值脉冲。电路端的储能与门槛策略应对这种非定常输入至关重要,这仍然可以回到“端电压门槛”和“Q–V环路面积随时间变化”的理论理解上。
6.5 声能:压力波驱动的微振动与器件灵敏度
声能采集看似能量密度很低,但它有一个特点:频率可以很高(相对人体运动),并且压力波能够驱动薄膜、振膜产生周期性微位移。公开综述中提到TENG可被构造成自供能麦克风,通过声压驱动结构振动产生电信号。理论上这类器件更像传感器:输出电压与声压之间的映射关系可以通过力学-电学耦合模型建立,其中振膜的等效弹簧常数、质量与阻尼决定位移幅值x(t),而电学部分把x(t)映射为V(t)与I(t)。当目标是“拾音/测量”而非“供能”,高输出阻抗并非缺点,因为后端可以用高阻抗测量电路读取电压信号;但若目标是“发电”,则需要足够的声压与合适的结构放大才能获得可用能量。综述里也提到过可卷曲的纸基多层结构用于声能采集,这类多层结构的理论意义在于把微小位移通过多层并联/串联等效放大为更大的电输出,同时纸基材料的孔隙结构可能提供更大的有效接触与更稳定的界面条件。
6.6 水波能:3D结构与多单元集成的尺度放大
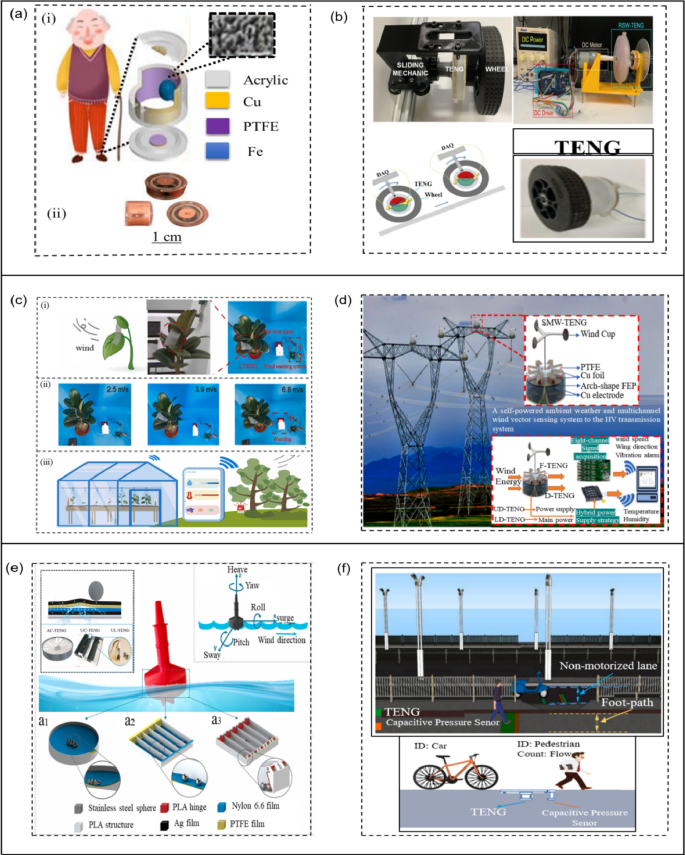
水波能的特点是能量规模大、分布广,但运动形式复杂且频率较低。公开综述给出了一个具有代表性的3D螺旋结构方案:利用螺旋结构与底部质量块形成可在水波扰动下振荡的系统,并采用垂直接触-分离模式实现能量转换。在该类装置中,水波驱动的相对运动形成电输出,开路电压峰值可达到约110 V量级,短路电流可达到约15 μA量级,并能够点亮LED等负载。理论上,这类结果并不神秘:水波提供较大的位移与足够的周期性,螺旋结构实现运动转换与位移放大,TENG在低频下仍可产生高电压脉冲;但要进一步提高可用功率,就必须走向多单元集成与规模化。综述中也展示了多个基本单元集成的水波采集结构,并给出了随着集成单元数n变化的输出电流、累积电荷与峰值功率变化趋势。其理论含义是:通过并联/串联与结构集成,可以把单元级的σ与S收益放大到系统级,并且在一定范围内输出随单元数增加而提高,但同时会受到同步性、机械耦合与电路失配的限制,因此并不是无限线性增长。
在建模上,多单元集成可以视作N个源的网络叠加:若并联,等效可转移电荷与电流能力提升,但电压不显著提升;若串联,电压可提升但对一致性与绝缘要求更高。水波系统的一个特殊挑战是环境导致的漏电与绝缘:海水环境电导高,封装不良会显著降低Rleak,使σ难以保持并引发电能直接泄漏。因此水波TENG的理论边界条件更苛刻:必须在结构上保证长期绝缘与密封,使得“高电压输出”不会被环境短路。只有在这个边界条件满足时,多单元集成的尺度放大才具有真实意义。
| 场景 | 主导机械量 | 电学模型输入量 | 更适合的模式与原因 | 结构设计的理论目标 |
|---|---|---|---|---|
| 振动 | 加速度/小位移/高循环 | x(t)、dx/dt、共振放大系数 | 接触-分离或自立式;通过共振放大x(t) | 提高有效x与频率,控制磨损与泄漏 |
| 旋转 | 连续角位移/可稳定转速 | 位置→电极周期映射、dQ/dt | 自立式/滑动;电极分段提升fout | 提升输出频率与电荷翻转次数 |
| 人体运动 | 低频/大形变/环境复杂 | σ随接触力变化、Rleak敏感 | 单电极或接触-分离;结构自由度大 | 在柔性下保持σ与绝缘,形成稳定x轨迹 |
| 风能 | 非定常/摆动或转动 | x(t)非平稳、门槛效应明显 | 滑动/自立式/接触-分离均可 | 提高平均能量注入,匹配整流门槛 |
| 声能 | 压力波/高频小位移 | 振膜位移响应、灵敏度 | 接触-分离或单电极 | 提高力学灵敏度与低噪声读取 |
| 水波能 | 低频/大位移/强环境约束 | 大尺度x(t)、多单元同步 | 接触-分离+集成 | 绝缘封装与规模化集成,抬升系统能量流 |
7 结语
把TENG从“结构拼装”提升到“理论可计算”,关键在于始终围绕三个层次建立因果链:第一层是界面层,接触起电给出表面电荷密度σ,并且σ的可达上限与保持能力决定了转换的驱动力边界;第二层是场与电容层,结构运动改变电场分布与等效电容/耦合电容网络,使得V–Q–几何量之间形成可推导的关系,典型形式如V(x,Q)=-(Q(x+d0))/(ε0S)+σx/ε0,这一关系把材料、几何与运动统一到同一套变量里;第三层是电路与能量层,负载阻抗、整流门槛与储能端电压共同决定Q(t)的真实轨迹,从而决定Q–V环路面积与每周期可输出能量W。四种经典工作模式的差异,归根结底是“哪一个几何参数在变化、耦合电容如何形成、参考电势如何定义”的差异;性能增强策略的差异,归根结底是“提高σ、优化d0与C、扩大S、提高dQ/dt、抑制泄漏”的差异。用这样的理论主线去阅读与设计,才能在面对新的机械输入、新的材料组合或新的结构约束时快速判断:应当改变哪一个参数、会带来怎样的输出变化、又会引入怎样的代价与边界条件,从而把TENG从“能做出来”推进到“能稳定、可预测地工作”。
参考文献
Udofa, E.S., Mohamed Ali, M. & Leow, P.L. Recent development in triboelectric nanogenerators: a review. J Mater Sci: Mater Electron 37, 6 (2026). https://doi.org/10.1007/s10854-025-16223-7


















 1162
1162

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











