








 超级会员免费看
超级会员免费看

一、非局部操作的数学定义与理论框架
1.1 非局部操作的通用公式
非局部操作(Non-local Operation)是该研究的核心创新点,其数学定义源自经典计算机视觉中的非局部均值算法(Non-local Means)。在深度神经网络中,非局部操作被形式化为:

其中:

1.2 与传统操作的对比分析
(1)与卷积操作的对比
传统卷积操作仅处理局部邻域(如3×3或5×5窗口),依赖深层堆叠逐步扩大感受野。而非局部操作直接计算全局位置间的依赖关系,具有以下优势:
- 单层即可捕获长程依赖
- 避免信息传递的路径损耗
- 支持跨时空维度的交互
(2)与循环操作的对比
RNN/LSTM等循环结构通过时间步迭代处理序列,存在梯度消失/爆炸问题。非局部操作:
- 并行计算所有位置关系
- 突破时间步限制
- 适用于空间和时空场景
(3)与全连接层的对比
全连接层的权重固定且与输入无关,而非局部操作:
- 动态计算位置间关系
- 保持输入输出位置对应
- 支持可变尺寸输入
1.3 归一化因子设计
归一化因子 C(x) 的选择影响模型稳定性:
二、非局部操作的具体实现形式
2.1 相似性函数f的四种设计
论文系统性地探索了四种成对函数设计:
(1)高斯函数(Gaussian)
![]()
- 直接计算原始特征的余弦相似度
- 保持经典非局部均值的数学形式
- 计算复杂度:
 (N为位置数)
(N为位置数)
(2)嵌入式高斯(Embedded Gaussian)
![]()
其中 ![]()
- 引入可学习的线性变换(1×1卷积)
- 将相似度计算映射到嵌入空间
- 与自注意力机制等价(Softmax归一化)
(3)点积(Dot Product)
![]()
- 去除Softmax激活
- 归一化因子设为位置总数N
- 实验显示与高斯版本效果相当
(4)拼接(Concatenation)
![]()
- 借鉴关系网络(Relation Networks)设计
- 引入非线性激活函数
- 需学习参数向量

2.2 特征变换函数g的设计
统一采用线性变换:
![]()
- 通过1×1卷积实现
- 减少通道数以降低计算量(典型为原通道数1/2)
- 保持位置对应关系不变
2.3 实例化对比实验结论
通过Kinetics数据集上的消融实验发现:
- 不同f函数版本性能差异小于1%(72.7%~72.9%)
- 自注意力(嵌入式高斯)并非性能提升的关键因素
- 非局部性(全局交互)本身才是核心优势
三、非局部块的结构设计
3.1 残差连接形式
将非局部操作封装为可插入模块:
![]()
3.2 模块结构示意图解析
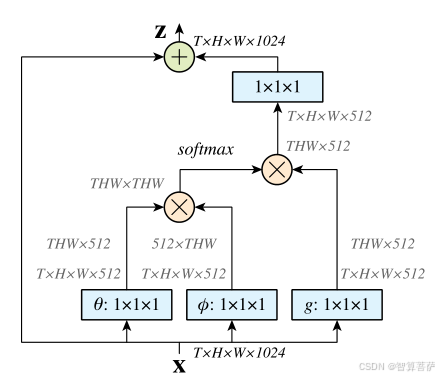
非局部块包含以下组件:
- θ路径:1×1卷积降维(通道数减半)
- φ路径:1×1卷积降维(同θ路径)
- g路径:1×1卷积降维
- 相似度计算:矩阵乘法实现成对关系
- Softmax归一化(仅高斯版本)
- 特征聚合:矩阵乘法结合g路径特征
- 1×1卷积升维:恢复原始通道数
- 残差相加:保留原始特征信息
3.3 模块插入策略
实验发现最佳实践:
- 插入位置:ResNet的res3和res4阶段
- 插入密度:每两个残差块插入一个非局部块
- 深层插入效果下降(因空间分辨率过低)
四、高效实现策略
4.1 通道缩减技术
- θ、φ、g路径均采用通道减半设计
- 计算量降低约50%
- 与ResNet瓶颈设计思想一致
4.2 空间下采样技巧
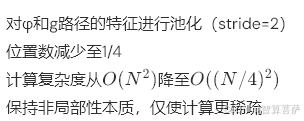
4.3 计算复杂度分析
以典型视频特征图尺寸为例:
- 输入尺寸:T×H×W = 4×14×14
- 原始计算量:784×784矩阵乘法
- 下采样后:196×196矩阵乘法
- FLOPs减少约75%,内存占用显著降低
五、与3D卷积的对比分析
5.1 计算效率对比
(基于ResNet-101基准)
| 模型类型 | 参数量倍数 | FLOPs倍数 | 精度(Top-1) |
|---|---|---|---|
| C2D基线 | 1.0× | 1.0× | 73.1% |
| I3D_3×3×3 | 1.5× | 1.8× | 74.1% |
| NL C2D(5块) | 1.2× | 1.2× | 75.1% |
5.2 特性对比
| 特性 | 3D卷积 | 非局部操作 |
|---|---|---|
| 感受野类型 | 局部窗口 | 全局交互 |
| 时空关系建模 | 显式时空滤波 | 隐式相似度计算 |
| 参数依赖性 | 静态卷积核 | 动态依赖关系 |
| 长程依赖捕获能力 | 需深层堆叠 | 单层即可实现 |
| 计算复杂度 | 与核尺寸立方成正比 | 与位置数平方成正比 |


















 1898
1898

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











