




工业自动化系统中,车间内通常部署多台PLC设备并需通过中央监控平台实现集中管控。考虑到工业现场设备间距普遍在数十至数百米范围,传统有线以太网虽能保障传输速率,但其施工需面临电缆沟开挖或复杂布线工程,既增加线材采购、人力投入及工期成本,又影响生产环境整洁度。本方案推荐的无线以太网技术,在维持同等传输性能的前提下,可有效规避物理线缆部署难题,其覆盖半径灵活适配5米至1000米的应用场景。经综合测算,相较于有线方案在施工周期、线材损耗及人工费用等方面的显性支出,无线组网方式可降低约40%的部署成本,同时缩短60%以上的实施周期,真正实现经济性与便捷性的双重提升。
一、方案概述
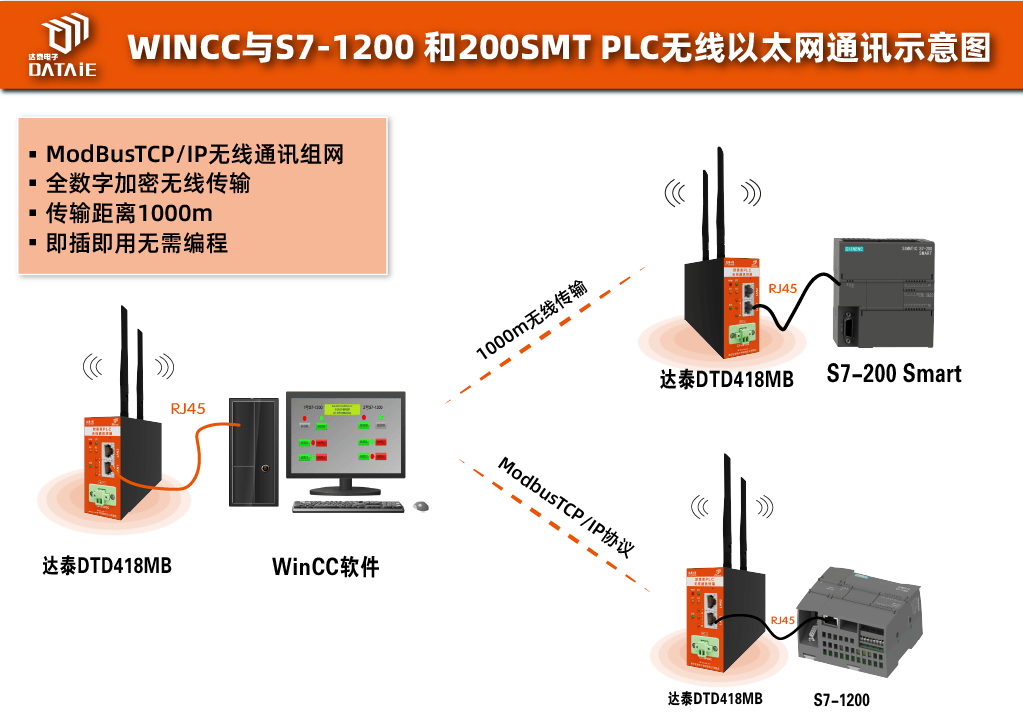
本方案以WinCC与西门子S7-1200和S7-200Smart PLC为例,在ModbusTCP/IP协议下实现无线以太网通信实现过程。在本方案中采用了西门子PLC无线通讯终端——DTD418MB,作为实现无线通讯的硬件设备,用户无需更改程序。
二、测试设备与参数
l 西门子PLC型号:S7-1200 × 1台
l 西门子PLC型号:S7-200Smart × 1台
l 上位机:WinCC7.4 × 1台
l 无线通讯终端——DTD418MB × 3块
l 主从关系:1主2从
l 通讯接口:RJ45接口
l 供电:12-24VDC
l 通讯协议:ModbusTCP/IP协议
l 传输距离:100米,1KM
三、接线方式
1.上位机与DTD418MB接线
用一根通讯线,一端接入DTD418M的RJ45接口,另一端接入上位机的RJ45接口。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1324
1324

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









