



上位机使用S7通信涉及诸多要点,稍不注意就容易踩坑。今天,我们就来详细剖析那些最常见的‘雷区’。
一、连接类型设置
以C#上位机使用Sharp7通信库为例,Sharp7默认使用的连接资源是PG,若不更改,可能会出现与STEP 7-Micro/WIN Smart编程软件不能同时使用的情况。因为S7-200smart CPU只支持一个PG连接。
以下是其支持的最大通信连接资源的详细解析:
1.与编程软件的通信
STEP 7-Micro/WIN SMART软件:支持1个连接,用于程序下载、调试和监控。
2.与HMI(人机界面)的通信
以太网接口:最多支持8个HMI设备连接。
RS485接口(PPI协议):最多支持4个HMI设备连接。扩展接口:通过CM01信号板扩展RS485/RS232接口后,最多可连接16个HMI设备(8个通过串口,8个通过网口)。
3.与其他S7-200 SMART CPU的通信
GET/PUT主动连接:支持8个连接,用于主动向其他CPU发送数据。GET/PUT被动连接:支持8个连接,用于接收其他CPU的数据。
4.与第三方设备的通信
Open IE协议:
主动连接:8个连接。
被动连接:8个连接。
RS485接口:支持Modbus RTU、USS、自由口通信,最多连接4个设备。扩展信号板(CM01):RS485/RS232接口最多连接4个设备。
5.PROFINET通信
作为IO设备:最多支持8个PROFINET IO设备连接。作为IO控制器:支持1个PROFINET IO控制器连接。
6.其他协议支持
TCP/IP协议:通过以太网接口支持多种终端连接,最多4个设备。PC Access SMART:作为OPC服务器,支持上位机读取数据,具体连接数受CPU性能限制。
为避免此问题,可将连接类型设置为GET/PUT或者HMI连接资源,它们都有8个连接资源,一般很难被全部占用。设置代码如下:

需要注意的是,Sharp7默认使用的连接资源就是PG,所以此行代码是必须的,否则就会出现和STEP 7-Micro/WIN SMART编程软件不能同时使用的情况。
二、PDU读取限制
S7协议一次性读取有限制,不同型号的CPU,其PDU(协议数据单元)大小不同,如S7-200smart/S7-1200/S7-300一般是240,S7-400一般是480,S7-1500一般是960。实际读取的字节数要在PDU的基础上减去包头的18个字节,即S7-200smart/S7-1200/S7-300一次可以读取222个字节,S7-400一般是462个字节,S7-1500一般是942个字节。若要读取大量数据,通信库底层通常会做分包处理,但会增加通信耗时。
三、数据地址与类型匹配
在进行数据交互时,数据地址的指向必须准确,大小要匹配,数据类型也要一一对应。比如在两PLC之间S7通讯时,交互数据的发送端和接收端的数据类型和长度不能错位或不一致,否则会导致通信错误或数据读取错误。
四、通信负载设置
如果上位机与PLC之间的通信频繁,可能会导致PLC的通信负载过高,影响PLC的正常运行。需要根据实际情况,合理设置PLC的通信负载参数,以确保通信的稳定性和实时性。
五、PLC侧配置
PLC侧需要进行一些配置才能与上位机进行S7通信。例如,要勾选允许来自远程对象的PUT/GET通信访问;如果要与DB块数据通信,需要去除DB的优化的块访问;务必保证通信地址是有效地址,读取的必须是有效地址,其他存储区也不能超过范围。
六、无线通信测试
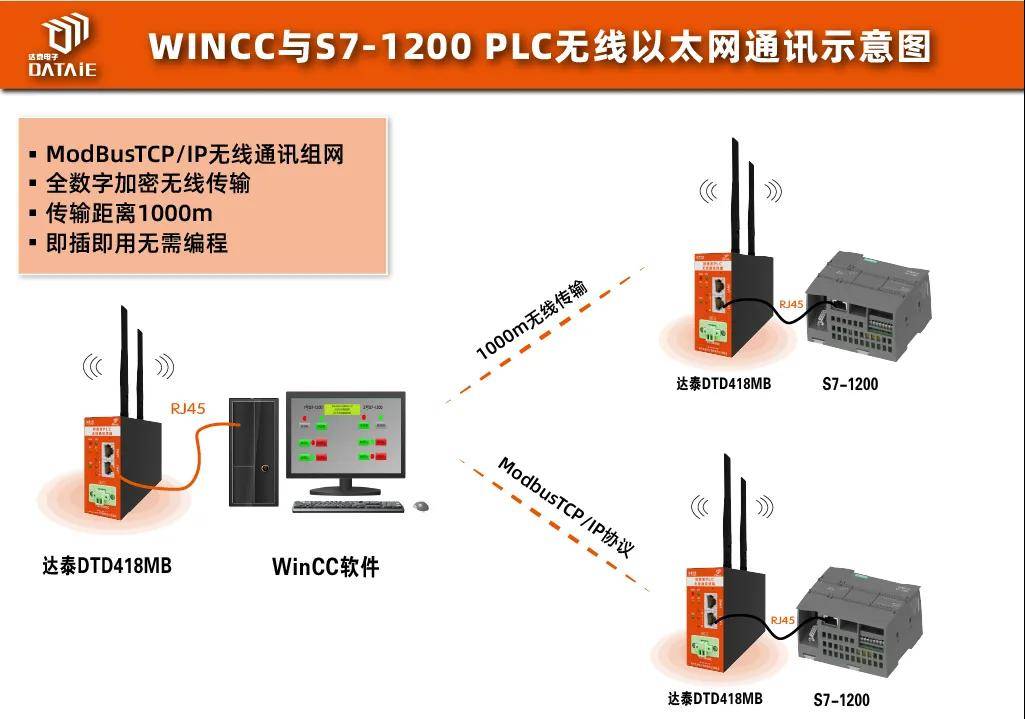
本方案以WinCC和2台西门子S7-1200 PLC为例,在ModbusTCP/IP协议下实现无线以太网通信实现过程。

















 1873
1873

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









