






题目:
思路:
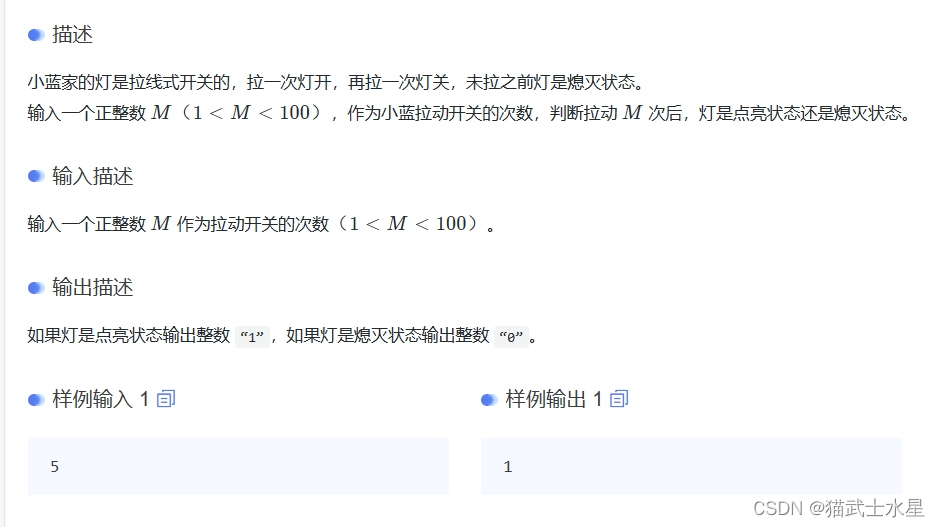
m%2的结果为0,就证明开关次数为偶数也就是处于关灯的状态就按题目所要求的输出0;
否则,就证明开关次数为奇数也就是处于开灯的状态就按题目所要求的输出1.
代码 :
#include<iostream>
using namespace std;
int m;//m为开关的次数
int main(){
scanf("%d",&m);//输入
if(m%2==0){//关灯状态
printf("0");
}
else{//开灯状态
printf("1");
}
return 0;
}


















 748
748

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









