







 本文是关于SLAM中三维空间刚体运动的学习笔记,主要讨论旋转和平移的描述。旋转通过旋转矩阵R表示,平移用向量t描述。旋转矩阵构成的集合SO(3),变换矩阵组成的群SE(3)。由于旋转矩阵和变换矩阵的冗余性和奇异性,引入了旋转向量和四元数来更紧凑地表示旋转,四元数在SLAM中常用于表示空间旋转。
本文是关于SLAM中三维空间刚体运动的学习笔记,主要讨论旋转和平移的描述。旋转通过旋转矩阵R表示,平移用向量t描述。旋转矩阵构成的集合SO(3),变换矩阵组成的群SE(3)。由于旋转矩阵和变换矩阵的冗余性和奇异性,引入了旋转向量和四元数来更紧凑地表示旋转,四元数在SLAM中常用于表示空间旋转。
注:本文是阅读了高翔博士的slam 14讲所记的笔记,内容大多来自
其书。
一个刚体(在SLAM中可简化理解为相机)在三维空间中的运动使用平移和旋转来描述。
1.相机的旋转和平移如何描述:先说旋转:
:设某个单位正交基 (e1,e2,e3) (相当于不变的世界坐标系)经过一次旋转,变成了 (e′ 1,e′ 2,e′ 3)(相当于相机的坐标系)。那么,对于同一个向量 a(注意该向量并没有 随着坐标系的旋转而发生运动),它在两个坐标系下的坐标为 [a1,a2,a3]T 和 [a′ 1,a′ 2,a′ 3]T。 根据坐标的定义,有:
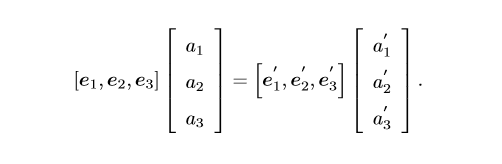
但我们想知道的是两个坐标之间的关系,形式应为:a=()a’
注:a和a’为坐标, ()里应为某种运算关系。所以对上式同时左乘:[e1T,e2T,e3T],得到下面的式子:
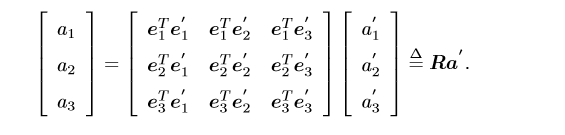
R即为旋转矩阵。旋转矩阵可以用来描述相机的旋转。
思考:现实中的旋转(360度以内),不考虑平移等因素,是以某
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









