







 本文介绍了相机的针孔模型、透镜畸变及其矫正方法。详细阐述了从世界坐标系到像素坐标的转换过程,包括相机内外参数、径向和切向畸变的纠正,并简要提到了双目相机和RGB-D相机的工作原理。
本文介绍了相机的针孔模型、透镜畸变及其矫正方法。详细阐述了从世界坐标系到像素坐标的转换过程,包括相机内外参数、径向和切向畸变的纠正,并简要提到了双目相机和RGB-D相机的工作原理。
本讲主要搞清楚相机的针孔模型、透镜的畸变模型。从而弄清成像(外部的三维点投影到相机内部成像平面)及相机的内外参。
一. 相机模型:针孔(小孔)成像模型:
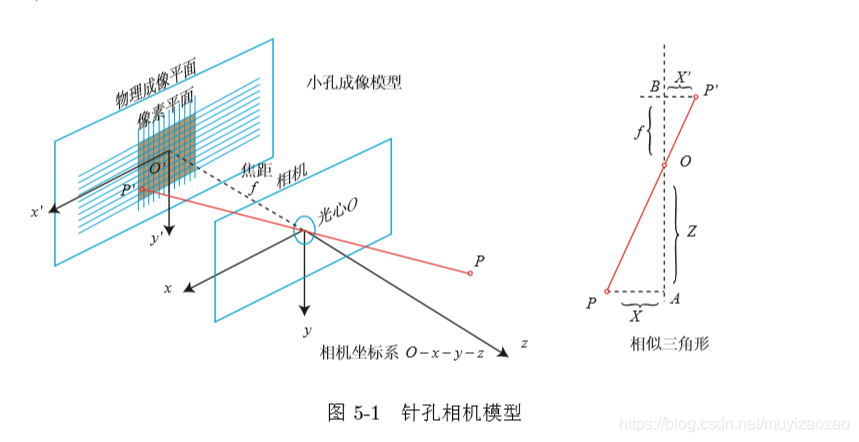
上图的几何模型如下:
O—x—y—z为相机坐标系(z指向相机的前方,x指向相机的右方,y指向下,O为相机的光心)。成像平面O’—x’—y’,现实世界的P点经过相机光心(小孔)投影后在成像平面上为像点P’。
设P点坐标为[X,Y,Z],P’坐标为[X’,Y’,Z’],并设焦距(光心到成像平面的距离)为f,则有:
 负号表示成像为倒的,为了简化模型,可以把成像平面对称到相机前方:
负号表示成像为倒的,为了简化模型,可以把成像平面对称到相机前方:
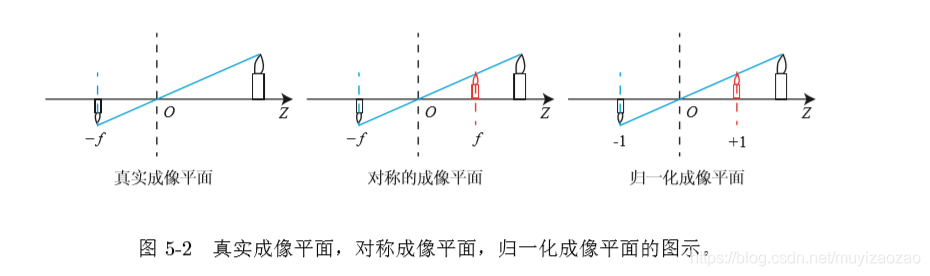
所以上式变为:
整理后:
上式描述了物理空间点P和它的像点P’的空间关系。
但是我们在相机中获得的是一个个的像素,需要在成像平面对像进行采样和量化。为了将相机上感受的光线转化为图像像素,设在成像平面(原点对称到相机前方)上有一像素平面o-u-v。在像素平面得到P’的坐标为(u,v)。
直接得出“P点的像”在像素平面的像素坐标(u,v)和空间点P在相机坐标下的坐标(X,Y,Z)的关系:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









