







一、前言
学习视频来自B站up主 DR_CAN的卡尔滤波器的讲解。
二、递归算法
估计真实数据(求平均值)
A = 1/k * (Z1 + Z2 + Z3 + ......+ Zk )
= 1/k * (Z1 + Z2 + Z3 + ......+ Z(k-1)) + 1/k * Zk
= 1/k * (k -1)/ (k-1) * (Z1 + Z2 + Z3 + ......+ Z(k-1)) + 1/k * Zk
= (k-1)/k * A(k-1) + 1/k * Zk
= A(k-1) - 1/k * A(k-1) + 1/k * Zk
A = A(k-1) + 1/k * (Zk - A(k-1))
1/k 可以用 Kk 代替。
公式描述为:
当前估计值 = 上一次估计值 + 系数 * (当前测量值 - 上一次估计值)
A :当前估计值 A(k-1):上一次估计值 1/k (或Kk) : 系数(也称卡尔曼增益)
Zk : 当前测量值 Z(k-1): 上一次测量值
求Kk
Kk = Eest(k-1) / ( Eest(k-1) + Emea(k))
Eest(k-1) : 上一次估计误差
Emea(k) :当前测量误差
由公式可见 : 当估计误差 远大于 测量误差时 Kk 趋近于 1,当前估计值趋近于当前的测量值
当估计误差 远小于 测量误差时 Kk 趋近于 0,当前估计值趋近于上一次估计值
求估计误差
Eest(k) = (1 - Kk)* Eest(k-1) //不作推导
C代码实现
执行顺序为 :
STEP1 : 计算Kk;
STEP 2 : 计算A;
STEP 2 : 计算Eest(k);
假设一个物体真实长度为50,测量工具的误差为3,第0次的估计值为40,第0次的估计误差为5,当前测量的值为51。代码实现如下:
#include <stdio.h>
#include <math.h>
#include <stdlib.h>
#include <string.h>
#define ERR_MEA 3
#define ACTUAL_VAL 50
typedef struct{
float ERR_est_last; //估计误差
float ERR_mea; //测量误差
float VAL_est_last; //上一次估计值
float VAL_est_curr; //当前估计值
float VAL_mea_curr; //当前测量值
float Kk; //卡尔曼增益
} KALMAN_PARM;
KALMAN_PARM kalman_val;
void CAL_VALUE_CURRENT(KALMAN_PARM *val);
int main(void){
memset(&kalman_val, 0,sizeof(KALMAN_PARM));
kalman_val.ERR_mea = ERR_MEA; //假设测量误差始终为3
kalman_val.ERR_est_last = 5.0; //给定一个初始估计误差
kalman_val.VAL_est_last = 40; //给定一个初始估计值
kalman_val.VAL_mea_curr = 51; //给定一个当前的测量值
for(int i = 0; i < 1000; i++){
CAL_VALUE_CURRENT(&kalman_val);
}
return 0;
}
//计算当前估计值
void CAL_VALUE_CURRENT(KALMAN_PARM *val){
val->VAL_mea_curr = ACTUAL_VAL + rand()%3; //制造一个在实际值上下浮动的测量值
val->Kk = val->ERR_est_last / (val->ERR_est_last + val->ERR_mea); //计算卡尔曼增益
val->VAL_est_curr = val->VAL_est_last + val->Kk * (val->VAL_mea_curr - val->VAL_est_last); //计算当前估计值
val->VAL_est_last = val->VAL_est_curr;
val->ERR_est_last = (1.0 - val->Kk) * val->ERR_est_last; //更新估计误差
printf("当前估计值为:%f\n", val->VAL_est_curr);
}以上的做法是 基于一个测量工具对一个事物的多次测量,估计结果只于上一次的估计值与当前的测量值相关。
二、数据融合
假设有两个称去称一个物体,第一个称的(Z1)30,第二个称得(Z2)32。 且第一个称的标准差为(B1)2,第二个的标准差为(B2)4。测量结果满足正态分布。
A (两组数据的最优解) = Z1 + K * (Z2 -Z1), 设X为A的标准差
X的平方 = VAR( Z1 + K * (Z2 -Z1)) // VAR 代表方差
= VAR( Z1 - K*Z1 + K * Z2)
= VAR((1- K)*Z1 + K * Z2 )
= (1- K) * (1- K) * VAR(Z1) + K * K * (Z2)
= (1- K) * (1- K) * B1*B1 + K * K * B2*B2
对K求导 令其等于0
-2(1-K)* B1*B1 + 2 *K *B2 * B2 = 0
K = (B1*B1)/ ((B1*B1) + (B2*B2 )) = 0.2
结合上述可 A= 30 + 0.2*(32 - 30) = 30.4
X的平方 = (1-0.2)的平方 * 2的平方 + 0.2的平方 * 4的平方 = 3.2
X = 1.79
c代码实现:
#include <stdio.h>
#include <math.h>
#include <string.h>
typedef struct{
double val; //测量值
double devi; //标准差
} Normal_distribution;
Normal_distribution Mea1,Mea2; //定义两个正太分布值
double optimal_solution; //最优解
double new_devi; //最优解的标准差
double Kk;
//数据融合
void Data_Fusion(Normal_distribution data1, Normal_distribution data2){
Kk = pow(2.0, data1.devi) / (pow(2.0, data1.devi) + pow(2.0, data2.devi));
printf("卡尔曼增益为:%f\n", Kk);
optimal_solution = data1.val + Kk * (data2.val - data1.val);
printf("最优解为:%f\n", optimal_solution);
}
void UPdata_devi(Normal_distribution data1, Normal_distribution data2){
// new_devi = (pow(2.0 , (1.0 - Kk)) * pow(2.0, data1.devi)) + (pow(2.0, Kk) * pow(2.0, data2.devi));
new_devi = (1.0 - Kk) * (1.0 - Kk) * data1.devi * data1.devi + Kk*Kk * data2.devi*data2.devi;
new_devi = sqrt(new_devi);
printf("最优解的标准差为:%f\n", new_devi);
}
int main(void){
memset(&Mea1, 0,sizeof(Mea1));
memset(&Mea2, 0,sizeof(Mea2));
Mea1.val = 30; //先给定两个初始值
Mea1.devi = 2;
Mea2.val = 32;
Mea2.devi = 4;
Data_Fusion(Mea1,Mea2);
UPdata_devi(Mea1,Mea2);
return 0;
}上述方法为寻求两种测量工具对同一物体测量结果的最优解。
三、协方差矩阵
方差与协方差在一个矩阵中表现出来,主要是体现不同变量之间的关联性。
假设有以下样本:
| 身高/X | 体重/Y | 年龄/z | |
| A | 179 | 74 | 33 |
| B | 187 | 80 | 31 |
| C | 175 | 71 | 28 |
| AVG | 180.5 | 75 | 30.7 |
VAR(X) = 24.89 协方差(XY) = 18.7
VAR(Y) = 14 协方差(XZ) = 18.7
VAR(Z) = 4.22 协方差(YZ) = 18.7
则矩阵表示如下:
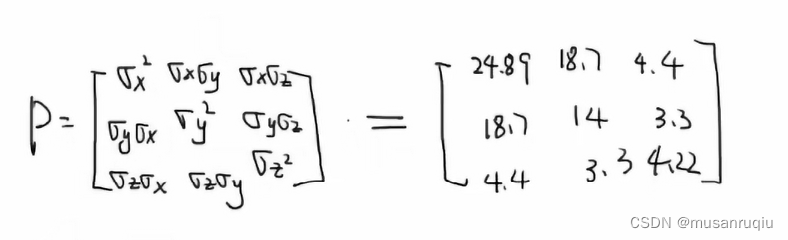
引用上述样本,C代码实现如下:
#include <stdio.h>
#include <math.h>
#include <stdlib.h>
double Covariance_Matrix[9] ;
typedef struct{
double Height;
double Weight;
double Age;
} SAMPIE;
SAMPIE p1 = {179,74,33};
SAMPIE p2 = {187,80,31};
SAMPIE p3 = {175,71,28};
//构建矩阵
void COV_MAT_CAL(void){
double avg_X, avg_Y,avg_Z; //三个平均值 分别对应Height,Weight,Age
double COV_X_2, COV_Y_2, COV_Z_2, COV_X_Y,COV_X_Z, COV_Y_Z; //6个协方差的值
avg_X = (p1.Height + p2.Height + p3.Height) / 3.0;
avg_Y = (p1.Weight + p2.Weight + p3.Weight) / 3.0;
avg_Z = (p1.Age + p2.Age + p3.Age) / 3.0;
COV_X_2 = ((p1.Height - avg_X) * (p1.Height - avg_X) + (p2.Height - avg_X) * (p2.Height - avg_X) + (p3.Height - avg_X) * (p3.Height - avg_X)) / 3.0;
COV_Y_2 = ((p1.Weight - avg_Y) * (p1.Weight - avg_Y) + (p2.Weight - avg_Y) * (p2.Weight - avg_Y) + (p3.Weight - avg_Y) * (p3.Weight - avg_Y)) / 3.0;
COV_Z_2 = ((p1.Age - avg_Z)*(p1.Age - avg_Z) + (p2.Age - avg_Z)*(p2.Age - avg_Z) + (p3.Age - avg_Z)*(p3.Age - avg_Z))/3.0;
COV_X_Y = ((p1.Height - avg_X) * (p1.Weight - avg_Y) + (p2.Height - avg_X) * (p2.Weight - avg_Y) + (p3.Height - avg_X) * (p3.Weight - avg_Y)) / 3.0;
COV_X_Z = ((p1.Height - avg_X) * (p1.Age - avg_Z) + (p2.Height - avg_X) * (p2.Age - avg_Z) + (p3.Height - avg_X) * (p3.Age - avg_Z)) / 3.0;
COV_Y_Z = ((p1.Weight - avg_Y) * (p1.Age - avg_Z) + (p2.Weight - avg_Y) * (p2.Age - avg_Z) + (p3.Weight - avg_Y) * (p3.Age - avg_Z)) / 3.0;
Covariance_Matrix[0] = COV_X_2;
Covariance_Matrix[1] = COV_X_Y;
Covariance_Matrix[2] = COV_X_Z;
Covariance_Matrix[3] = COV_X_Y;
Covariance_Matrix[4] = COV_Y_2;
Covariance_Matrix[5] = COV_Y_Z;
Covariance_Matrix[6] = COV_X_Z;
Covariance_Matrix[7] = COV_Y_Z;
Covariance_Matrix[8] = COV_Z_2;
printf("%f %f %f\n%f %f %f\n%f %f %f\n", Covariance_Matrix[0],Covariance_Matrix[1],Covariance_Matrix[2],\
Covariance_Matrix[3],Covariance_Matrix[4],Covariance_Matrix[5],\
Covariance_Matrix[6],Covariance_Matrix[7],Covariance_Matrix[8] );
}
int main(void){
COV_MAT_CAL();
return 0;
}四、 状态空间表达
大抵如下:
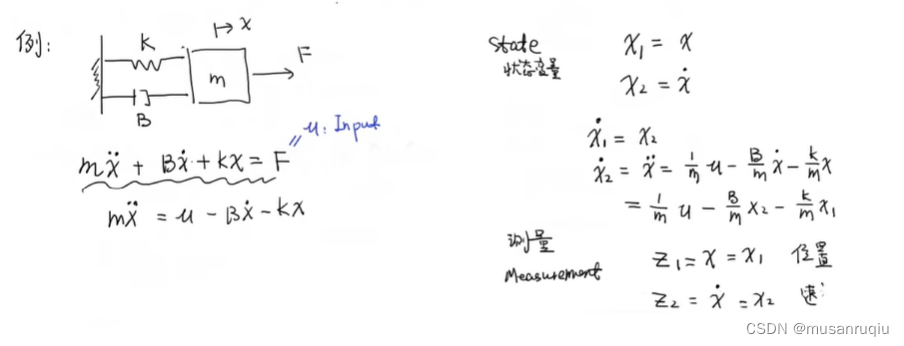
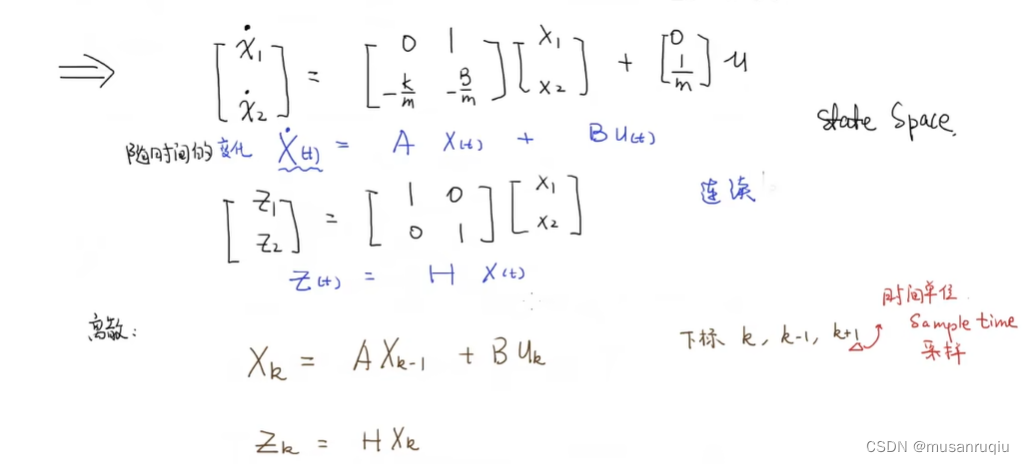
X上的一个点,两个点分别为对时间的一阶求导和二阶求导。
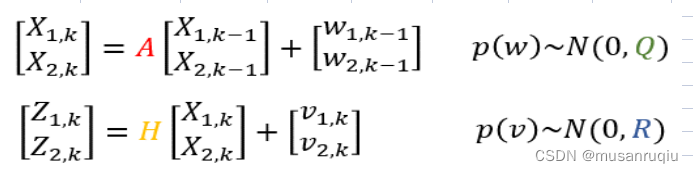
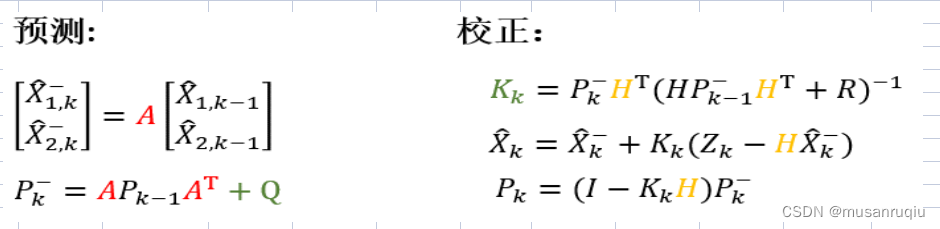
五、视频中,二阶卡尔曼滤波器的C实现
矩阵的运算包括加、减、乘、数乘、转置、行列式、逆矩阵、代数余子式。
数据来源视频中提供的excel表。自行获取。
C代码如下:
#include <stdio.h>
#include <math.h>
#include <stdlib.h>
typedef struct{
double A11;
double A12;
double A21;
double A22;
} TWO_DIM_Matrix; //定义2x2的矩阵
typedef struct{
double Position; //位置
double Velocity; //速度
}Statue;
typedef struct{
double W1; //状态位置误差
double W2; //状态速度误差
}Statue_ERR;
typedef struct{
double V1; //测量位置误差
double V2; //测量速度误差
}MEA_ERR;
//状态位置过程误差
double E1[30] = { 0.097, 0.150, 0.108, -0.293, 0.214, -0.024, -0.097, -0.414, -0.466, -0.287,\
0.316, -0.165, 0.222, 0.314, -0.532, -0.083, -0.144, -0.305, -0.499, -0.194,\
0.177, -0.310, -0.446, -0.024, 0.239, 0.353, -0.026, -0.621, 0.167, 0.164};
//状态速度过程误差
double E2[30] = { 0.159, -0.418, 0.044, -0.115, -0.375, -0.165, -0.390, -0.162, 0.061, -0.024,\
-0.309, 0.060, 0.201, 0.303, -0.305, -0.325, 0.227, 0.176, -0.182, 0.265,\
-0.179, 0.140, 0.051, -0.761, 0.146, -0.030, 0.340, 0.399, -0.421, -0.473};
//测量位置过程误差
double E3[30] = {-0.208, 0.911, -0.899, -0.232, -0.114, 0.399, -0.493, 0.400, 0.208, -0.878,\
1.933, 0.161, -1.906, -1.473, 0.417, -0.744, -0.576, -1.120, 0.838, -1.633,\
-0.261, -0.214, -0.026, 0.015, 0.230, 1.321, 1.287, -1.508, -1.194, 1.420};
//测量速度过程误差
double E4[30] = { 0.272, 0.414, 0.438, -0.985, -0.183, -0.382, 1.181, -0.731, -0.235, -0.639,\
1.352, 1.352, 1.187, -0.200, 1.082, 1.364, 0.180, -0.610, -0.443, 0.301,\
0.041, 0.165, -0.164, 0.399, -0.923, -0.613, 0.131, 0.475, 0.428, -0.185};
Statue_ERR Process_Err[30]; //过程误差
MEA_ERR measure_Err[30]; //测量误差
Statue X[30], Z[30], X_Hat[30], X_Hat_PRE[30]; //
TWO_DIM_Matrix Q, R, A, H, E, P_k[30], P_k_PRE[30],K_k[30];
void Status_Param_init(void){
for(int i = 0; i<30;i++){ //将样本误差数据存入数组
Process_Err[i].W1 = E1[i];
Process_Err[i].W2 = E2[i];
}
X[0].Position = 0.0; //给定初始位置和速度值
X[0].Velocity = 1.0;
for(int j = 1 ; j<30; j++){
X[j].Position = A.A11*X[j-1].Position + A.A12*X[j-1].Velocity + Process_Err[j-1].W1;
X[j].Velocity = A.A22*X[j-1].Velocity + Process_Err[j-1].W2; //A.A21 的值为0 可以不写
// printf("%f\n",X[j].Velocity);
}
}
void Mea_Param_init(void){
for(int i = 0; i<30; i++){
measure_Err[i].V1 = E3[i];
measure_Err[i].V2 = E4[i];
}
for(int j =1; j<30; j++){
Z[j].Position = H.A11*X[j].Position + H.A12*X[j-1].Velocity + measure_Err[j].V1;
Z[j].Velocity = H.A22*X[j].Velocity + measure_Err[j].V2; //A.A21 的值为0 可以不写
// printf("%f\n",Z[j].Velocity);
}
}
void TWO_DIM_Matrix_PARAM_init(void){
//Q Matrix init
Q.A11 = 0.1; Q.A12 = 0.0;
Q.A21 = 0.0; Q.A22 = 0.1;
//R Matrix init
R.A11 = 1.0; R.A12 = 0.0;
R.A21 = 0.0; R.A22 = 1.0;
//A Matrix init
A.A11 = 1.0; A.A12 = 1.0;
A.A21 = 0.0; A.A22 = 1.0;
//H Matrix init
H.A11 = 1.0; H.A12 = 0.0;
H.A21 = 0.0; H.A22 = 1.0;
//E Matrix init
E.A11 = 1.0; E.A12 = 0.0;
E.A21 = 0.0; E.A22 = 1.0;
P_k[0].A11 = 1.0; P_k[0].A12 = 0.0;
P_k[0].A21 = 0.0; P_k[0].A22 = 1.0;
}
//矩阵的转置运算
TWO_DIM_Matrix Matrix_Transpose(TWO_DIM_Matrix input_matrix){
TWO_DIM_Matrix Result;
Result.A11 = input_matrix.A11;
Result.A12 = input_matrix.A21;
Result.A21 = input_matrix.A12;
Result.A22 = input_matrix.A22;
return Result;
}
//矩阵的代数余子式
TWO_DIM_Matrix Matrix_Congruent(TWO_DIM_Matrix input_matrix){
TWO_DIM_Matrix Result;
Result.A11 = input_matrix.A22;
Result.A12 = input_matrix.A21*(-1);
Result.A21 = input_matrix.A12*(-1);
Result.A22 = input_matrix.A11;
return Result;
}
//矩阵相乘
TWO_DIM_Matrix Matrix_Multi(TWO_DIM_Matrix input_matrix1 , TWO_DIM_Matrix input_matrix2){
TWO_DIM_Matrix Result;
Result.A11 = input_matrix1.A11*input_matrix2.A11 + input_matrix1.A12*input_matrix2.A21;
Result.A12 = input_matrix1.A11*input_matrix2.A12 + input_matrix1.A12*input_matrix2.A22;
Result.A21 = input_matrix1.A21*input_matrix2.A11 + input_matrix1.A22*input_matrix2.A21;
Result.A22 = input_matrix1.A21*input_matrix2.A12 + input_matrix1.A22*input_matrix2.A22;
return Result;
}
//矩阵相加
TWO_DIM_Matrix Matrix_ADD(TWO_DIM_Matrix input_matrix1 , TWO_DIM_Matrix input_matrix2){
TWO_DIM_Matrix Result;
Result.A11 = input_matrix1.A11 + input_matrix2.A11;
Result.A12 = input_matrix1.A12 + input_matrix2.A12;
Result.A21 = input_matrix1.A21 + input_matrix2.A21;
Result.A22 = input_matrix1.A22 + input_matrix2.A22;
return Result;
}
//矩阵相减
TWO_DIM_Matrix Matrix_Reduce(TWO_DIM_Matrix input_matrix1 , TWO_DIM_Matrix input_matrix2){
TWO_DIM_Matrix Result;
Result.A11 = input_matrix1.A11 - input_matrix2.A11;
Result.A12 = input_matrix1.A12 - input_matrix2.A12;
Result.A21 = input_matrix1.A21 - input_matrix2.A21;
Result.A22 = input_matrix1.A22 - input_matrix2.A22;
return Result;
}
//矩阵的逆矩阵
TWO_DIM_Matrix Inverse_Matrix(TWO_DIM_Matrix input_matrix){
TWO_DIM_Matrix Result;
double A;
A = input_matrix.A11*input_matrix.A22 - input_matrix.A12*input_matrix.A21;
A = 1.0/A;
Result = Matrix_Congruent(input_matrix);
Result.A11 = A * Result.A11;
Result.A12 = A * Result.A12;
Result.A21 = A * Result.A21;
Result.A22 = A * Result.A22;
return Result;
}
void Kalman_Calc(void){
TWO_DIM_Matrix buffer;
X_Hat[0].Position = 0.0;
X_Hat[0].Velocity = 1.0;
for(int i = 1 ; i<30; i++){
X_Hat_PRE[i].Position = A.A11 * X_Hat[i-1].Position + A.A12*X_Hat[i-1].Velocity;
X_Hat_PRE[i].Velocity = A.A22 * X_Hat[i-1].Velocity;
buffer = Matrix_Multi(A, P_k[i-1]);
buffer = Matrix_Multi(buffer, Matrix_Transpose(A));
P_k_PRE[i] = Matrix_ADD(buffer, Q);
buffer = Matrix_ADD(P_k_PRE[i], R);
buffer = Inverse_Matrix(buffer);
K_k[i] = Matrix_Multi(P_k_PRE[i], buffer);
X_Hat[i].Position = X_Hat_PRE[i].Position + K_k[i].A11 * (Z[i].Position - X_Hat_PRE[i].Position) + K_k[i].A12 * (Z[i].Velocity - X_Hat_PRE[i].Velocity);
X_Hat[i].Velocity = X_Hat_PRE[i].Velocity + K_k[i].A21 * (Z[i].Position - X_Hat_PRE[i].Position) + K_k[i].A22 * (Z[i].Velocity - X_Hat_PRE[i].Velocity);
P_k[i] = Matrix_Multi(Matrix_Reduce(E,K_k[i]), P_k_PRE[i]);
}
}
int main(void){
int i;
TWO_DIM_Matrix_PARAM_init();
Status_Param_init();
Mea_Param_init();
Kalman_Calc();
for(i = 0;i<30;i++){
printf("%f\n",X_Hat_PRE[i].Velocity);
}
for(i = 0;i<30;i++){
printf("%f\n",X_Hat[i].Velocity);
}
return 0;
}
















 478
478

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









