






 本文介绍使用PCL库加载并显示一个名为rabbit.pcd的点云文件,并利用Eigen库进行矩阵运算。首先展示了如何配置PCL库以支持不同版本的VS编译器,接着给出了显示点云文件的具体代码实现,最后通过一个简单的Eigen库示例演示了矩阵的创建和运算。
本文介绍使用PCL库加载并显示一个名为rabbit.pcd的点云文件,并利用Eigen库进行矩阵运算。首先展示了如何配置PCL库以支持不同版本的VS编译器,接着给出了显示点云文件的具体代码实现,最后通过一个简单的Eigen库示例演示了矩阵的创建和运算。
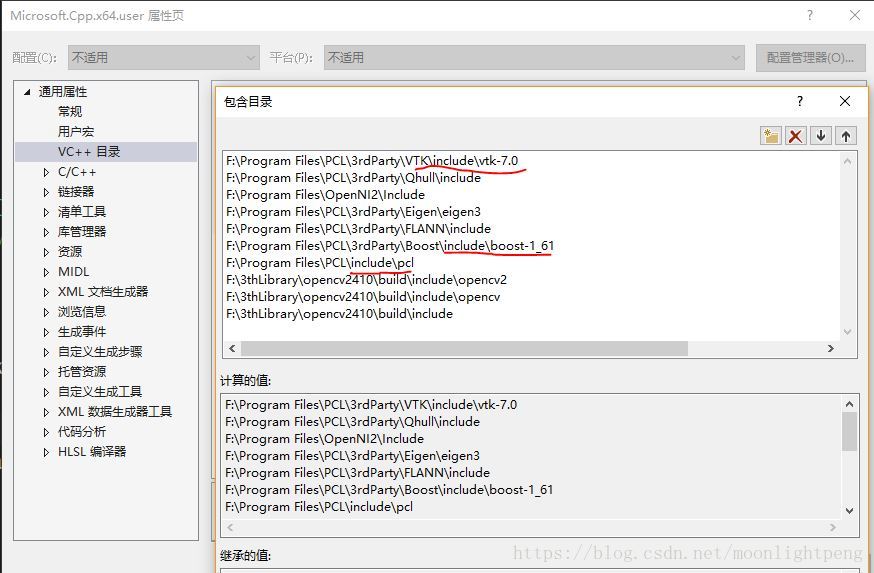
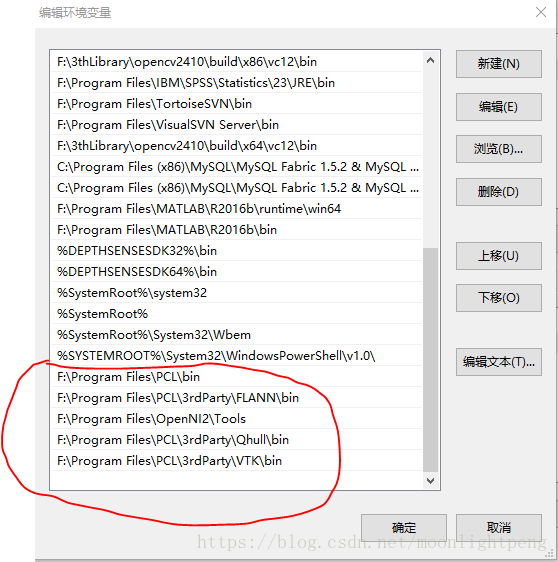
1, VS2015 PCL1.8.0 相关配置参考 PCL 点云初识
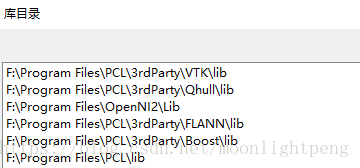
再根据debug or realse添加 lib
2,rabbit.pcd在百度云盘 https://pan.baidu.com/s/1Gsnsb4AllcJxjdsYbGw-Cw
3, 显示小白兔的程序
#include<pcl/visualization/cloud_viewer.h>
#include<iostream>//标准C++库中的输入输出类相关头文件。
#include<pcl/io/io.h>
#include<pcl/io/pcd_io.h>//pcd 读写类相关的头文件。
#include<pcl/io/ply_io.h>
#include<pcl/point_types.h> //PCL中支持的点类型头文件。
using namespace std;
using namespace pcl;
void viewerOneOff(visualization::PCLVisualizer& viewer) {
viewer.setBackgroundColor(0, 0, 0); //设置背景颜色为黑色
}
int main() {
PointCloud<PointXYZ>::Ptr cloud(new PointCloud<PointXYZ>);
char strfilepath[256] = "rabbit.pcd";
if (-1 == io::loadPCDFile(strfilepath, *cloud)) {
cout << "error input!" << endl;
return -1;
}
cout << cloud->points.size() << endl;
visualization::CloudViewer viewer("Cloud Viewer: Rabbit"); //创建viewer对象
viewer.showCloud(cloud);
viewer.runOnVisualizationThreadOnce(viewerOneOff);
system("pause");
return 0;
}
4, rabbit
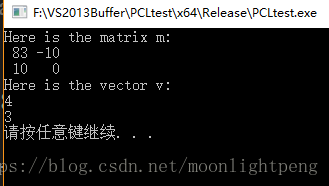
5 ,Eigen
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
int main(int argc, char* argv[])
{
MatrixXd m(2, 2);
m(0, 0) = 83;
m(1, 0) = 10;
m(0, 1) = -10;
m(1, 1) = m(1, 0) + m(0, 1);
std::cout << "Here is the matrix m:\n" << m << std::endl;
VectorXd v(2);
v(0) = 4;
v(1) = v(0) - 1;
std::cout << "Here is the vector v:\n" << v << std::endl;
system("pause");
return 0;
}

















 7088
7088

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









