 状态空间与相轨迹分析
状态空间与相轨迹分析





状态空间方程
状态空间方程是现代控制理论的基础,它以矩阵的形式,用一系列一阶微分方程表达系统状态变量、输入及输出之间的关系。
高阶微分方程
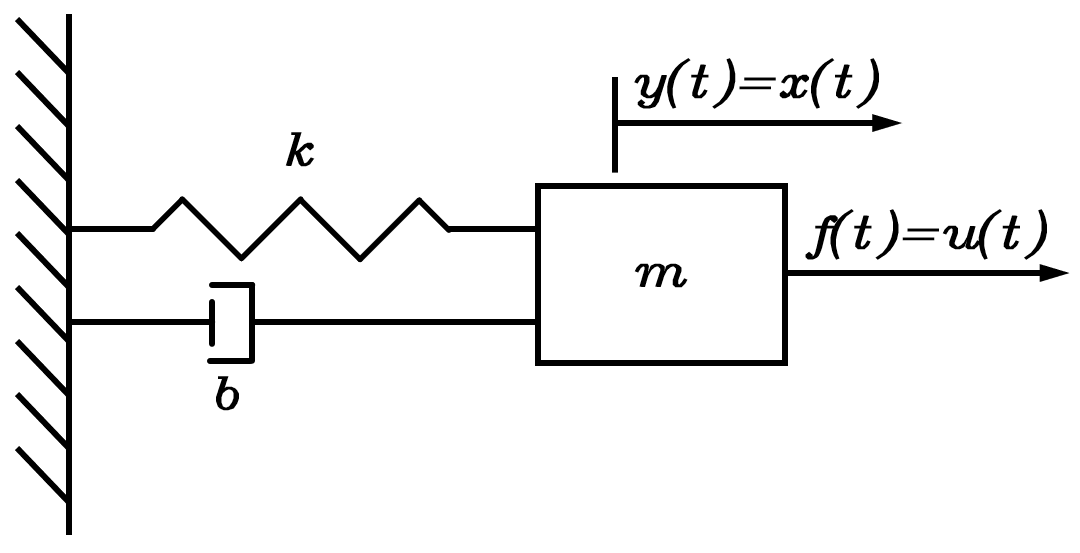
状态空间方程可以将高阶微分方程转化为一阶微分方程组。考虑上图所示的弹簧质量阻尼系统,它的动态微分方程为
md2x(t)dt2+bdx(t)dt+kx(t)=f(t) m\frac{\mathrm d^2x(t)}{\mathrm dt^2}+b\frac{\mathrm dx(t)}{\mathrm dt}+kx(t)=f(t) mdt2d2x(t)+bdtdx(t)+kx(t)=f(t)
其中x(t)x(t)x(t)是位移(方向向右),mmm是质量,bbb是阻尼系数,kkk是弹簧系数,f(t)f(t)f(t)是外力。令系统的输入等于外力u(t)=f(t)u(t)=f(t)u(t)=f(t),输出等于位移y(t)=x(t)y(t)=x(t)y(t)=x(t),则通过拉普拉斯变换可得系统的传递函数为
G(s)=Y(s)U(s)=1ms2+bs+k G(s)=\frac{Y(s)}{U(s)}=\frac1{ms^2+bs+k} G(s)=U(s)Y(s)=ms2+bs+k1
在现代控制理论中,我们用状态空间方程的表达方式。令输出量及微分方程中最高阶导数以下的各阶导数为状态变量
z1(t)=x(t)z2(t)=dz1(t)dt=dx(t)dt \begin{split} &z_1(t)=x(t)\\ &z_2(t)=\frac{\mathrm dz_1(t)}{\mathrm dt}=\frac{\mathrm dx(t)}{\mathrm dt} \end{split} z1(t)=x(t)z2(t)=dtdz1(t)=dtdx(t)
取z2(t)z_2(t)z2(t)对时间ttt的导数,结合系统的微分方程并代入u(t)=f(t)u(t)=f(t)u(t)=f(t)有
dz2(t)dt=d2x(t)dt2=1m(f(t)−bdx(t)dt−kx(t))=1mu(t)−bmz2(t)−kmz1(t) \begin{split} \frac{\mathrm dz_2(t)}{\mathrm dt}&=\frac{\mathrm d^2x(t)}{\mathrm dt^2}=\frac1m\left(f(t)-b\frac{\mathrm dx(t)}{\mathrm dt}-kx(t)\right)\\ &=\frac1mu(t)-\frac bmz_2(t)-\frac kmz_1(t) \end{split} dtdz2(t)=dt2d2x(t)=m1(f(t)−bdtdx(t)−kx(t))=m1u(t)−mbz2(t)−mkz1(t)
现在我们得到了一阶微分方程组
{dz1(t)dt=z2(t)dz2(t)dt=1mu(t)−bmz2(t)−kmz1(t) \left\{\begin{split} &\frac{\mathrm dz_1(t)}{\mathrm dt}=z_2(t)\\ &\frac{\mathrm dz_2(t)}{\mathrm dt}=\frac1mu(t)-\frac bmz_2(t)-\frac kmz_1(t) \end{split}\right. ⎩⎨⎧dtdz1(t)=z2(t)dtdz2(t)=m1u(t)−mbz2(t)−mkz1(t)
将上式写成紧凑的矩阵表达形式可得
ddt[z1(t)z2(t)]=[01−km−bm][z1(t)z2(t)]+[01m][u(t)] \frac{\mathrm d}{\mathrm dt}\begin{bmatrix}z_1(t)\\z_2(t)\end{bmatrix}=\begin{bmatrix}0&1\\\displaystyle-\frac km&\displaystyle-\frac bm\end{bmatrix}\begin{bmatrix}z_1(t)\\z_2(t)\end{bmatrix}+\begin{bmatrix}0\\\displaystyle\frac1m\end{bmatrix}[u(t)] dtd[z1(t)z2(t)]=[0−mk1−mb][z1(t)z2(t)]+[0m1][u(t)]
系统的输出y(t)=x(t)y(t)=x(t)y(t)=x(t)也可以写成矩阵形式
y(t)=[10][z1(t)z2(t)]+[0][u(t)] y(t)=\begin{bmatrix}1&0\end{bmatrix}\begin{bmatrix}z_1(t)\\z_2(t)\end{bmatrix}+[0][u(t)] y(t)=[10][z1(t)z2(t)]+[0][u(t)]
上述形式可推广并得到状态空间方程的一般形式
dz(t)dt=Az(t)+Bu(t)y(t)=Cz(t)+Du(t) \begin{matrix}\displaystyle\frac{\mathrm d\boldsymbol z(t)}{\mathrm dt}=\boldsymbol {Az}(t)+\boldsymbol{Bu}(t)\\\boldsymbol y(t)=\boldsymbol {Cz}(t)+\boldsymbol{Du}(t)\end{matrix} dtdz(t)=Az(t)+Bu(t)y(t)=Cz(t)+Du(t)
| 符号 | 名称 | 维度 |
|---|---|---|
| z(t)\boldsymbol z(t)z(t) | 状态变量 | n×1n\times1n×1 |
| y(t)\boldsymbol y(t)y(t) | 系统输出 | m×1m\times1m×1 |
| u(t)\boldsymbol u(t)u(t) | 系统输入 | p×1p\times1p×1 |
| A\boldsymbol AA | 状态矩阵 | n×nn\times nn×n |
| B\boldsymbol BB | 输入矩阵 | n×pn\times pn×p |
| C\boldsymbol CC | 输出矩阵 | m×nm\times nm×n |
| D\boldsymbol DD | 直接传递矩阵 | m×pm\times pm×p |
状态空间方程与传递函数的关系
上述单输入单输出系统可以同时用传递函数和状态空间方程表示,下面讨论这两种形式之间的关系。
对状态空间方程的一般形式两边进行拉普拉斯变换
L[dz(t)dt]=L[Az(t)+Bu(t)]L[y(t)]=L[Cz(t)+Du(t)] \begin{matrix}\displaystyle\mathcal L\left[\frac{\mathrm d\boldsymbol z(t)}{\mathrm dt}\right]=\mathcal L[\boldsymbol {Az}(t)+\boldsymbol{Bu}(t)]\\\mathcal L[\boldsymbol y(t)]=\mathcal L[\boldsymbol {Cz}(t)+\boldsymbol{Du}(t)]\end{matrix} L[dtdz(t)]=L[Az(t)+Bu(t)]L[y(t)]=L[Cz(t)+Du(t)]
对于零初始状态,上式可整理为
sZ(s)=AZ(s)+BU(s)①Y(s)=CZ(s)+DU(s)② \begin{matrix} s\boldsymbol Z(s)=\boldsymbol{AZ}(s)+\boldsymbol{BU}(s)①\\ \boldsymbol Y(s)=\boldsymbol {CZ}(s)+\boldsymbol{DU}(s)② \end{matrix} sZ(s)=AZ(s)+BU(s)①Y(s)=CZ(s)+DU(s)②
其中Z(s)=L[z(t)],Y(s)=L[y(t)],U(s)=L[u(t)]\boldsymbol Z(s)=\mathcal L[\boldsymbol z(t)],\boldsymbol Y(s)=\mathcal L[\boldsymbol y(t)],\boldsymbol U(s)=\mathcal L[\boldsymbol u(t)]Z(s)=L[z(t)],Y(s)=L[y(t)],U(s)=L[u(t)]。式①调整后得
Z(s)=(sI−A)−1BU(s) \boldsymbol Z(s)=(s\boldsymbol I-\boldsymbol A)^{-1}\boldsymbol{BU}(s) Z(s)=(sI−A)−1BU(s)
将其代入式②得
Y(s)=(C(sI−A)−1B+D)U(s) \boldsymbol Y(s)=(\boldsymbol C(s\boldsymbol I-\boldsymbol A)^{-1}\boldsymbol B+\boldsymbol D)\boldsymbol U(s) Y(s)=(C(sI−A)−1B+D)U(s)
因此系统的传递函数可以写为
G(s)=Y(s)U(s)=C(sI−A)−1B+D=C(sI−A)∗B+∣sI−A∣D∣sI−A∣ G(s)=\frac{\boldsymbol Y(s)}{\boldsymbol U(s)}=\boldsymbol C(s\boldsymbol I-\boldsymbol A)^{-1}\boldsymbol B+\boldsymbol D=\frac{\boldsymbol C(s\boldsymbol I-\boldsymbol A)^*\boldsymbol B+|s\boldsymbol I-\boldsymbol A|\boldsymbol D}{|s\boldsymbol I-\boldsymbol A|} G(s)=U(s)Y(s)=C(sI−A)−1B+D=∣sI−A∣C(sI−A)∗B+∣sI−A∣D
写成分数形式后,∣sI−A∣=0|s\boldsymbol I-\boldsymbol A|=0∣sI−A∣=0得出的sss即为该传递函数的极点,同时根据该方程的定义,sss也是矩阵A\boldsymbol AA的特征值,因此可通过分析矩阵A\boldsymbol AA的特征值判断系统的表现。
多输入多输出系统
状态空间方程还可用于表示表示多输入多输出系统,以下面这个电路网络为例,该系统有两个输入u(t)=[e1(t),e2(t)]⊤\boldsymbol u(t)=[e_1(t),e_2(t)]^\topu(t)=[e1(t),e2(t)]⊤和两个输出y(t)=[i1(t),eR3(t)]⊤\boldsymbol y(t)=[i_1(t),e_{R_3}(t)]^\topy(t)=[i1(t),eR3(t)]⊤
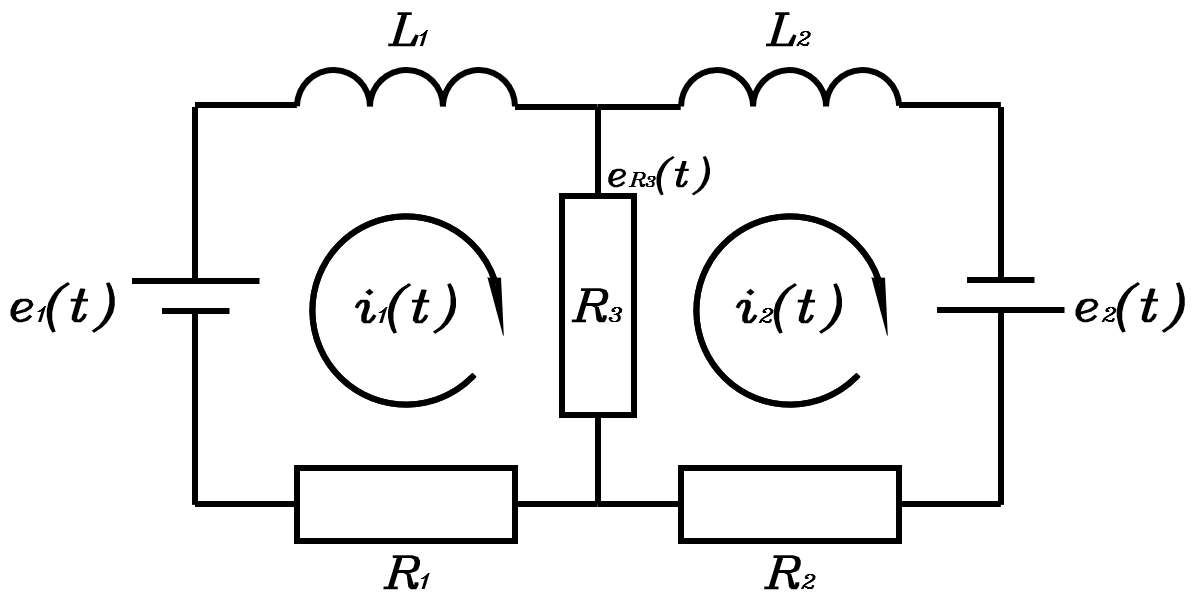
对闭合回路1和2应用基尔霍夫电压定律,我们可以分别列出其动态微分方程
L1di1(t)dt+i1(t)R1+eR3(t)=e1(t)L2di2(t)dt+i2(t)R2−eR3(t)=e2(t) \begin{matrix}\displaystyle L_1\frac{\mathrm di_1(t)}{\mathrm dt}+i_1(t)R_1+e_{R_3}(t)=e_1(t)\\ \displaystyle L_2\frac{\mathrm di_2(t)}{\mathrm dt}+i_2(t)R_2-e_{R_3}(t)=e_2(t)\end{matrix} L1dtdi1(t)+i1(t)R1+eR3(t)=e1(t)L2dtdi2(t)+i2(t)R2−eR3(t)=e2(t)
其中eR3(t)=(i1(t)−t2(t))R3e_{R_3}(t)=(i_1(t)-t_2(t))R_3eR3(t)=(i1(t)−t2(t))R3,代入调整后得到
L1di1(t)dt+i1(t)(R1+R3)−i2(t)R3=e1(t)L2di2(t)dt+i2(t)(R2+R3)−i1(t)R3=e2(t) \begin{matrix}\displaystyle L_1\frac{\mathrm di_1(t)}{\mathrm dt}+i_1(t)(R_1+R_3)-i_2(t)R_3=e_1(t)\\ \displaystyle L_2\frac{\mathrm di_2(t)}{\mathrm dt}+i_2(t)(R_2+R_3)-i_1(t)R_3=e_2(t)\end{matrix} L1dtdi1(t)+i1(t)(R1+R3)−i2(t)R3=e1(t)L2dtdi2(t)+i2(t)(R2+R3)−i1(t)R3=e2(t)
选取系统的输入量作为状态变量
z1(t)=i1(t)z2(t)=i2(t) \begin{matrix}z_1(t)=i_1(t)\\z_2(t)=i_2(t)\end{matrix} z1(t)=i1(t)z2(t)=i2(t)
并代入调整后得到
dz1(t)dt=−R1+R3L1z1(t)+R3L1z2(t)+1L1e1(t)dz2(t)dt=R3L2z1(t)−R2+R3L2z2(t)+1L2e2(t) \begin{matrix}\displaystyle\frac{\mathrm dz_1(t)}{\mathrm dt}=-\frac{R_1+R_3}{L_1}z_1(t)+\frac{R_3}{L_1}z_2(t)+\frac1{L_1}e_1(t)\\ \displaystyle\frac{\mathrm dz_2(t)}{\mathrm dt}=\frac{R_3}{L_2}z_1(t)-\frac{R_2+R_3}{L_2}z_2(t)+\frac1{L_2}e_2(t)\end{matrix} dtdz1(t)=−L1R1+R3z1(t)+L1R3z2(t)+L11e1(t)dtdz2(t)=L2R3z1(t)−L2R2+R3z2(t)+L21e2(t)
将上式写成矩阵形式有
[dz1(t)dtdz2(t)dt]=[−R1+R3L1R3L1R3L2−R2+R3L2][z1(t)z2(t)]+[1L1001L2][e1(t)e2(t)] \begin{bmatrix}\displaystyle\frac{\mathrm dz_1(t)}{\mathrm dt}\\\displaystyle\frac{\mathrm dz_2(t)}{\mathrm dt}\end{bmatrix}=\begin{bmatrix}-\displaystyle\frac{R_1+R_3}{L_1}&\displaystyle\frac{R_3}{L_1}\\\displaystyle\frac{R_3}{L_2}&-\displaystyle\frac{R_2+R_3}{L_2}\end{bmatrix}\begin{bmatrix}z_1(t)\\z_2(t)\end{bmatrix}+\begin{bmatrix}\displaystyle\frac1{L_1}&0\\0&\displaystyle\frac1{L_2}\end{bmatrix}\begin{bmatrix}e_1(t)\\e_2(t)\end{bmatrix} dtdz1(t)dtdz2(t)=−L1R1+R3L2R3L1R3−L2R2+R3[z1(t)z2(t)]+L1100L21[e1(t)e2(t)]
同理系统输出可以写为
y(t)=[i1(t)eR3(t)]=[10R3−R3][z1(t)z2(t)]+[0000][e1(t)e2(t)] \boldsymbol y(t)=\begin{bmatrix}i_1(t)\\e_{R_3}(t)\end{bmatrix}=\begin{bmatrix}1&0\\R_3&-R_3\end{bmatrix}\begin{bmatrix}z_1(t)\\z_2(t)\end{bmatrix}+\begin{bmatrix}0&0\\0&0\end{bmatrix}\begin{bmatrix}e_1(t)\\e_2(t)\end{bmatrix} y(t)=[i1(t)eR3(t)]=[1R30−R3][z1(t)z2(t)]+[0000][e1(t)e2(t)]
相平面与相轨迹分析
相平面与相轨迹使用直观的图形来分析微分方程。相轨迹描述了系统在没有输入影响的情况下,状态变量随时间在相平面上变化的轨迹。
一维相轨迹
首先讨论一阶微分方程的分析方法,考虑如下方程
dz(t)dt=z2(t)−1 \frac{\mathrm dz(t)}{\mathrm dt}=z^2(t)-1 dtdz(t)=z2(t)−1
以z(t)z(t)z(t)为横轴,dz(t)dt\displaystyle\frac{\mathrm dz(t)}{\mathrm dt}dtdz(t)为纵轴,可绘制出一条抛物线
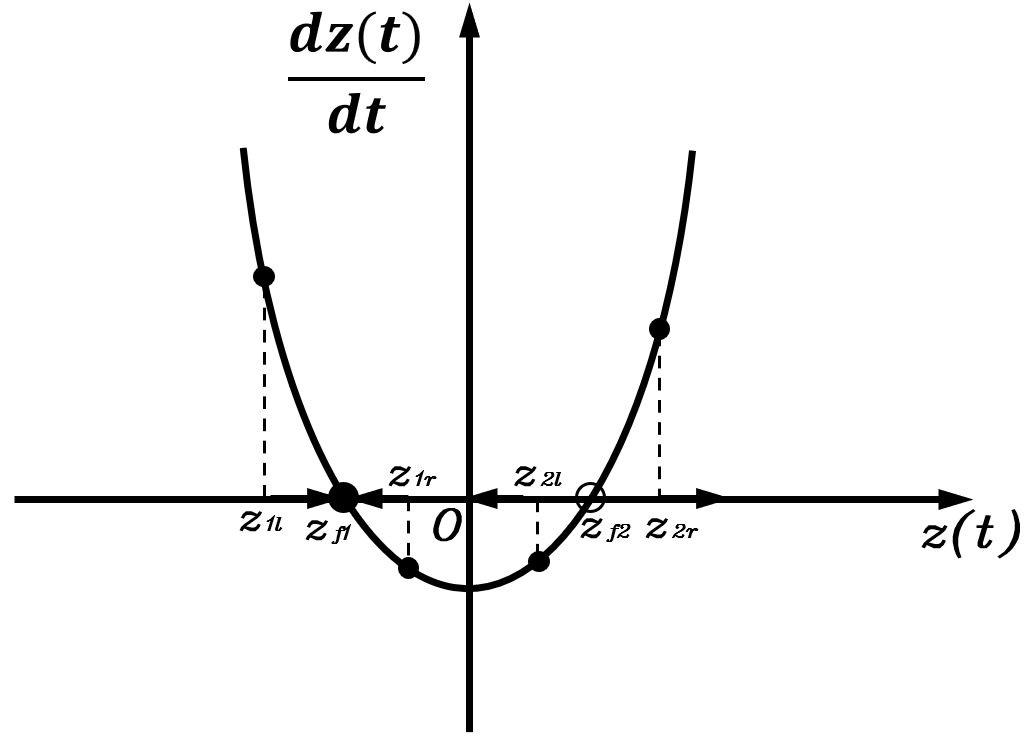
在该相平面中,位于横轴上方的点dz(t)dt>0\displaystyle\frac{\mathrm dz(t)}{\mathrm dt}>0dtdz(t)>0,z(t)z(t)z(t)将随时间向右变化;位于横轴下方的点dz(t)dt<0\displaystyle\frac{\mathrm dz(t)}{\mathrm dt}<0dtdz(t)<0,z(t)z(t)z(t)将随时间向左变化。其中zf1z_{f1}zf1和zf2z_{f2}zf2是抛物线与横轴的交点,dz(t)dt=0\displaystyle\frac{\mathrm dz(t)}{\mathrm dt}=0dtdz(t)=0,此时z(t)z(t)z(t)不会发生改变,因此这两个点被称为平衡点。
当状态变量小范围偏离平衡点zf1z_{f1}zf1时,无论其位于zf1z_{f1}zf1左侧还是右侧,都将随时间回到zf1z_{f1}zf1,因此zf1z_{f1}zf1是稳定平衡点;而当状态变量小范围偏离平衡点zf2z_{f2}zf2时,无论其位于zf2z_{f2}zf2左侧还是右侧,都无法随时间回到zf2z_{f2}zf2,因此zf2z_{f2}zf2是不稳定平衡点。
只有在z(0)<zf2z(0)<z_{f2}z(0)<zf2时,状态变量才会回到平衡点zf1z_{f1}zf1,因此zf1z_{f1}zf1是一个局部稳定的平衡点。
二维相轨迹
对于一个二维系统,在没有输入的情况下,其状态空间方程为
ddt[z1(t)z2(t)]=[a11a12a21a22][z1(t)z2(t)] \frac{\mathrm d}{\mathrm dt}\begin{bmatrix}z_1(t)\\z_2(t)\end{bmatrix}=\begin{bmatrix}a_{11}&a_{12}\\a_{21}&a_{22}\end{bmatrix}\begin{bmatrix}z_1(t)\\z_2(t)\end{bmatrix} dtd[z1(t)z2(t)]=[a11a21a12a22][z1(t)z2(t)]
其平衡点位于z1(t)=z2(t)=0z_1(t)=z_2(t)=0z1(t)=z2(t)=0处。
简化形式
若a12,a21≠0a_{12},a_{21}\neq0a12,a21=0,则dz1(t)dt,dz2(t)dt\displaystyle\frac{\mathrm dz_1(t)}{\mathrm dt},\frac{\mathrm dz_2(t)}{\mathrm dt}dtdz1(t),dtdz2(t)均由z1(t),z2(t)z_1(t),z_2(t)z1(t),z2(t)共同影响,即两个状态变量是耦合的,不易进行分析,因此先考虑a12=a21=0a_{12}=a_{21}=0a12=a21=0的简化形式,即
ddt[z1(t)z2(t)]=[a1100a22][z1(t)z2(t)] \frac{\mathrm d}{\mathrm dt}\begin{bmatrix}z_1(t)\\z_2(t)\end{bmatrix}=\begin{bmatrix}a_{11}&0\\0&a_{22}\end{bmatrix}\begin{bmatrix}z_1(t)\\z_2(t)\end{bmatrix} dtd[z1(t)z2(t)]=[a1100a22][z1(t)z2(t)]
下面根据a11a_{11}a11和a22a_{22}a22的符号进行分类讨论
情况一:a11,a22>0a_{11},a_{22}>0a11,a22>0
此时z1(t),z2(t)z_1(t),z_2(t)z1(t),z2(t)与其各自的导数同号,即状态变量为正则朝正方向增长,为负则朝负方向增长,平衡点之外的点均随时间远离平衡点,因此该平衡点为不稳定节点。
如果a11=a22a_{11}=a_{22}a11=a22,则相轨迹呈均匀发散的射线状
如果a11≠a22a_{11}\neq a_{22}a11=a22,则坐标轴外的相轨迹以曲线朝状态变量变化速率大的方向弯曲

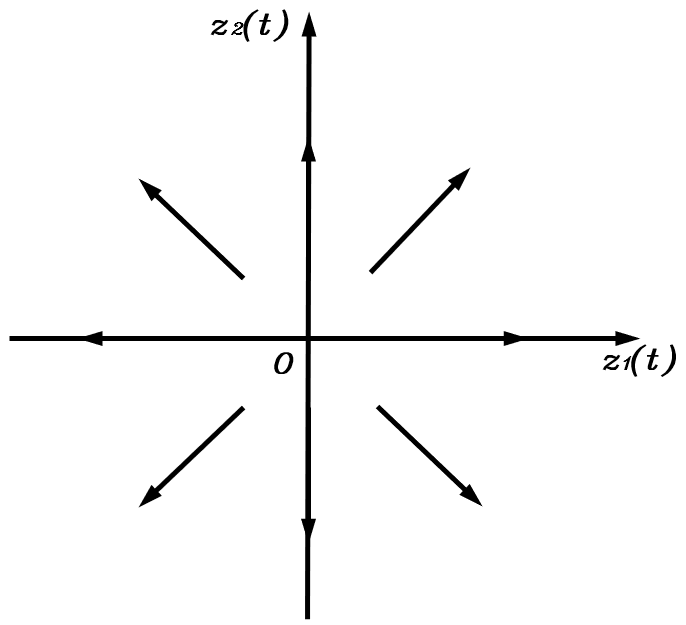
情况二:a11>0a_{11}>0a11>0且a22<0a_{22}<0a22<0
此时z1(t)z_1(t)z1(t)变化方向与符号相同,而z2(t)z_2(t)z2(t)变化方向与符号相反,即在平衡点之外,z1(t)z_1(t)z1(t)趋于无穷,z2(t)z_2(t)z2(t)趋于零,因此相轨迹会沿着横轴远离平衡点,而沿着纵轴靠近平衡点
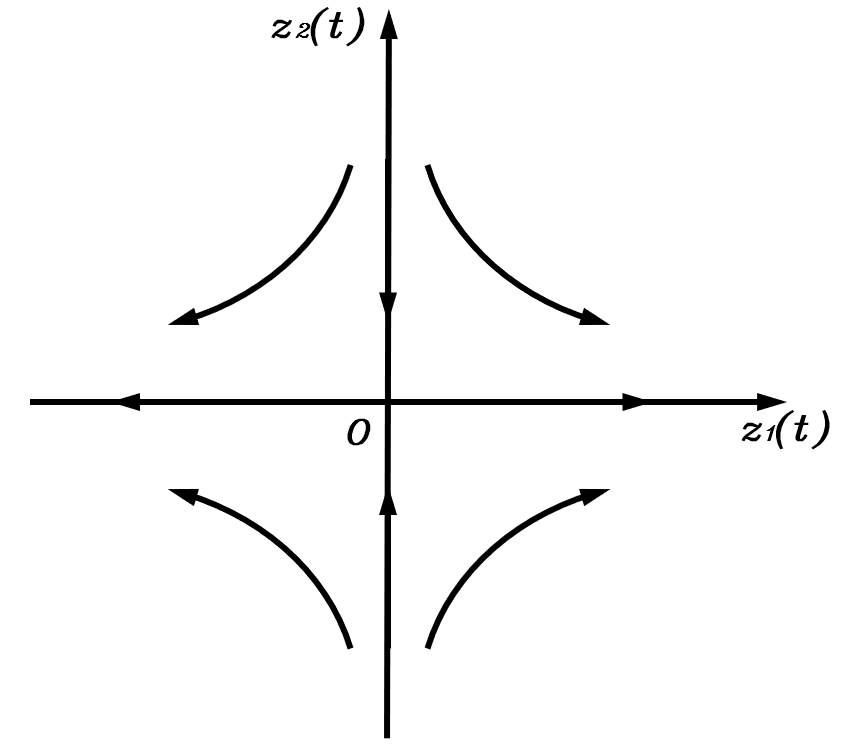
这种仅在一个维度上偏移后会收敛回原平衡点的平衡点称为鞍点,是一个不稳定的点。
a11<0a_{11}<0a11<0且a22>0a_{22}>0a22>0的情况与之类似,不再赘述。
情况三:a11,a22<0a_{11},a_{22}<0a11,a22<0
与情况一的分析类似,其相轨迹如下图所示
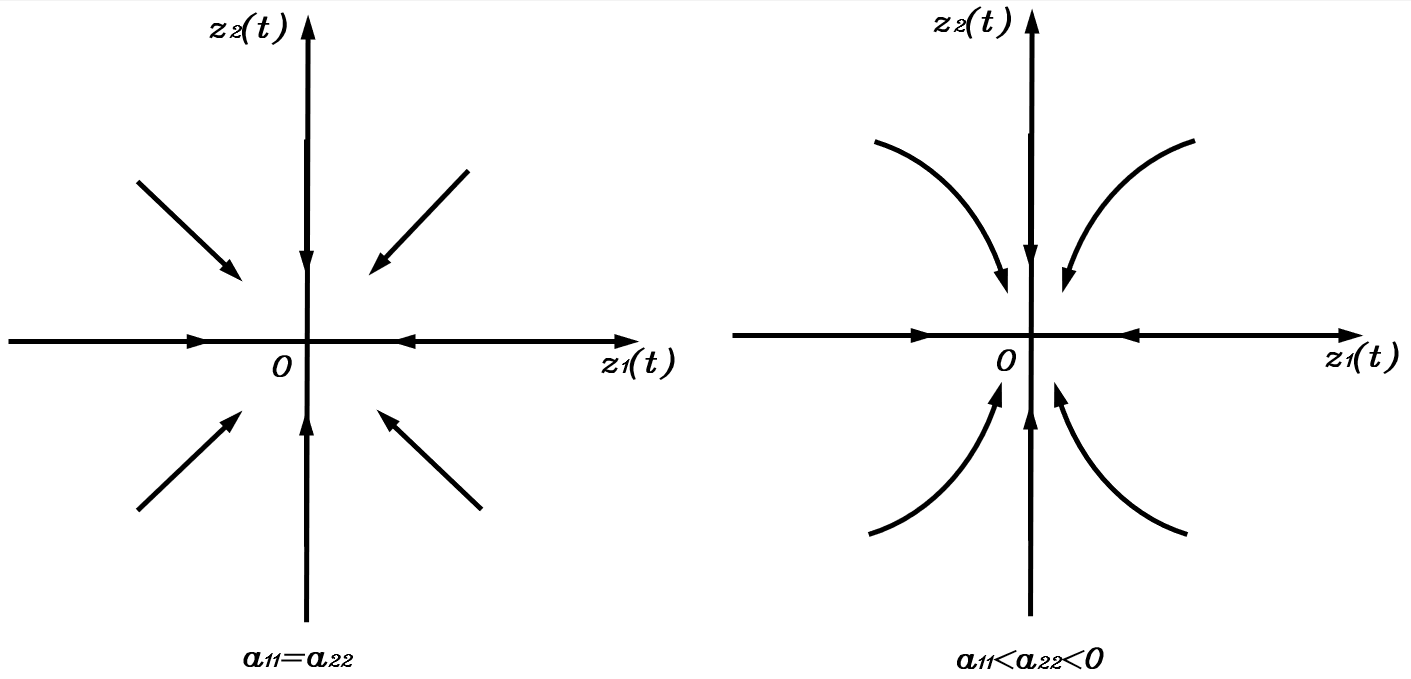
这种情况下,该平衡点为稳定节点。
线性方程组解耦
对于一般形式的无输入的状态空间方程,我们需要通过解耦将其简化为易于分析的形式,其思路是利用特征值和特征向量将矩阵转化为对角矩阵。
线性代数的知识这里只简单引入,给定一个方阵A\boldsymbol AA,如果向量v\boldsymbol vv经A\boldsymbol AA线性变换后,得到的新的向量与原向量v\boldsymbol vv共线,则向量v\boldsymbol vv为矩阵A\boldsymbol AA的特征向量,即
Av=λv \boldsymbol{Av}=\lambda\boldsymbol v Av=λv
其中λ≠0\lambda\neq0λ=0为矩阵A\boldsymbol AA的特征值。
求解特征值与特征向量的步骤如下
Av−λv=0⇒(A−λI)v=0⇒∣A−λI∣=0 \begin{matrix} \boldsymbol{Av}-\lambda\boldsymbol v=0\\ \Rightarrow(\boldsymbol A-\lambda\boldsymbol I)\boldsymbol v=0\\ \Rightarrow|\boldsymbol A-\lambda\boldsymbol I|=0 \end{matrix} Av−λv=0⇒(A−λI)v=0⇒∣A−λI∣=0
将最终的行列式展开得到的方程称为矩阵A\boldsymbol AA的特征方程,可以得到其特征值。
现在对于一般形式的状态空间方程
dz(t)dt=Az(t) \frac{\mathrm d\boldsymbol z(t)}{\mathrm dt}=\boldsymbol {Az}(t) dtdz(t)=Az(t)
设n×nn\times nn×n矩阵A\boldsymbol AA的一系列特征向量为v1,v2,⋯ ,vn\boldsymbol v_1,\boldsymbol v_2,\cdots,\boldsymbol v_nv1,v2,⋯,vn,则定义过渡矩阵为
P=[v1,v2,⋯ ,vn] \boldsymbol P=[\boldsymbol v_1,\boldsymbol v_2,\cdots,\boldsymbol v_n] P=[v1,v2,⋯,vn]
其具有如下性质
AP=PD \boldsymbol{AP}=\boldsymbol{PD} AP=PD
其中D\boldsymbol DD是一个特征值位于对角线上的对角矩阵
D=[λ1λ2⋱λn] \boldsymbol D=\begin{bmatrix}\lambda_1&&&\\&\lambda_2&&\\&&\ddots&\\&&&\lambda_n\end{bmatrix} D=λ1λ2⋱λn
下面定义一组新的状态变量zˉ(t)\bar{\boldsymbol z}(t)zˉ(t),令
z(t)=Pzˉ(t) \boldsymbol z(t)=\boldsymbol P\bar{\boldsymbol z}(t) z(t)=Pzˉ(t)
将其代入状态空间方程得
Pdzˉ(t)dt=APzˉ(t) \boldsymbol P\frac{\mathrm d\bar{\boldsymbol z}(t)}{\mathrm dt}=\boldsymbol {AP}\bar{\boldsymbol z}(t) Pdtdzˉ(t)=APzˉ(t)
等式两边同时左乘P−1\boldsymbol P^{-1}P−1得
P−1Pdzˉ(t)dt=P−1APzˉ(t)⇒dzˉ(t)dt=Dzˉ(t) \begin{matrix}\displaystyle\boldsymbol P^{-1}\boldsymbol P\frac{\mathrm d\bar{\boldsymbol z}(t)}{\mathrm dt}=\boldsymbol P^{-1}\boldsymbol {AP}\bar{\boldsymbol z}(t)\\\Rightarrow\displaystyle\frac{\mathrm d\bar{\boldsymbol z}(t)}{\mathrm dt}=\boldsymbol D\bar{\boldsymbol z}(t)\end{matrix} P−1Pdtdzˉ(t)=P−1APzˉ(t)⇒dtdzˉ(t)=Dzˉ(t)
由于D\boldsymbol DD是对角矩阵,所以新的状态变量zˉ1(t),zˉ2(t),⋯ ,zˉn(t)\bar z_1(t),\bar z_2(t),\cdots,\bar z_n(t)zˉ1(t),zˉ2(t),⋯,zˉn(t)的变化量只和自身相关,达到了解耦的效果。根据微分方程的求解公式可得
zˉi(t)=Cieλit(i=1,2,⋯ ,n) \bar z_i(t)=C_ie^{\lambda_it}(i=1,2,\cdots,n) zˉi(t)=Cieλit(i=1,2,⋯,n)
再将新的状态变量代回z(t)=Pzˉ(t)\boldsymbol z(t)=\boldsymbol P\bar{\boldsymbol z}(t)z(t)=Pzˉ(t)即可求出原状态变量。
一般形式
在一般形式下,假设我们已经求解出解耦后新状态变量zˉ(t)\bar{\boldsymbol z}(t)zˉ(t)的相轨迹,以下面这个式子为例
ddt[zˉ1(t)zˉ2(t)]=[100−1][zˉ1(t)zˉ2(t)] \frac{\mathrm d}{\mathrm dt}\begin{bmatrix}\bar z_1(t)\\\bar z_2(t)\end{bmatrix}=\begin{bmatrix}1&0\\0&-1\end{bmatrix}\begin{bmatrix}\bar z_1(t)\\\bar z_2(t)\end{bmatrix} dtd[zˉ1(t)zˉ2(t)]=[100−1][zˉ1(t)zˉ2(t)]
现在要还原原状态变量z(t)\boldsymbol z(t)z(t)的相轨迹,例如已知z(t)\boldsymbol z(t)z(t)与zˉ(t)\bar{\boldsymbol z}(t)zˉ(t)的关系为
z(t)=Pzˉ(t)=[3113][zˉ1(t)zˉ2(t)]=zˉ1(t)[31]+zˉ2(t)[13] \boldsymbol z(t)=\boldsymbol P\bar{\boldsymbol z}(t)=\begin{bmatrix}3&1\\1&3\end{bmatrix}\begin{bmatrix}\bar z_1(t)\\\bar z_2(t)\end{bmatrix}=\bar z_1(t)\begin{bmatrix}3\\1\end{bmatrix}+\bar z_2(t)\begin{bmatrix}1\\3\end{bmatrix} z(t)=Pzˉ(t)=[3113][zˉ1(t)zˉ2(t)]=zˉ1(t)[31]+zˉ2(t)[13]
由此看出z(t)\boldsymbol z(t)z(t)是zˉ(t)\bar{\boldsymbol z}(t)zˉ(t)的线性变换,因而zˉ(t)\bar{\boldsymbol z}(t)zˉ(t)的相轨迹也经该线性变换映射到z(t)\boldsymbol z(t)z(t)上
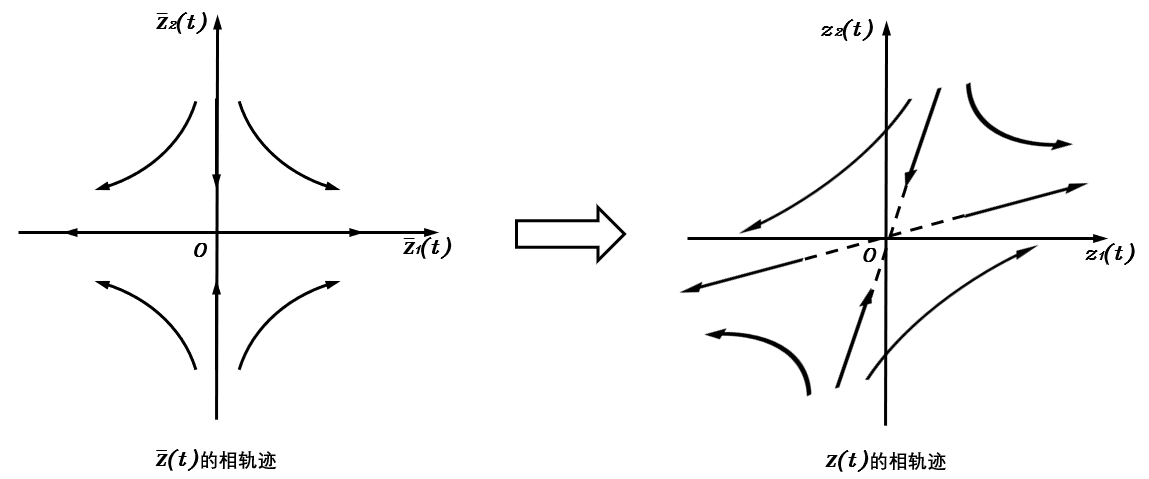
线性变换不会改变平衡点的性质,此平衡点仍然是一个鞍点。
对于特征值和特征向量存在复数的情况,线性变换将不再适用,此时需要从解入手分析。以下面这个系统为例简单介绍其分析思路
dz(t)dt=[04−10]z(t) \frac{\mathrm d\boldsymbol z(t)}{\mathrm dt}=\begin{bmatrix}0&4\\-1&0\end{bmatrix}\boldsymbol z(t) dtdz(t)=[0−140]z(t)
其状态矩阵的特征值和特征向量为
{λ1=2jλ2=−2j{v1=[2j]v2=[2−j] \left\{\begin{matrix}\lambda_1=2\mathrm j\\\lambda_2=-2\mathrm j\end{matrix}\right. \left\{\begin{matrix}\boldsymbol v_1=\begin{bmatrix}2\\\mathrm j\end{bmatrix}\\\boldsymbol v_2=\begin{bmatrix}2\\-\mathrm j\end{bmatrix}\end{matrix}\right. {λ1=2jλ2=−2j⎩⎨⎧v1=[2j]v2=[2−j]
利用解耦方法可以最终求得(中途代入欧拉公式ejt=cost+jsinte^{\mathrm jt}=\cos t+\mathrm j\sin tejt=cost+jsint)
z(t)=[2(C1+C2)cos2t+2(C1−C2)jsin2t(C1−C2)jcos2t−(C1+C2)sin2t] \boldsymbol z(t)=\begin{bmatrix}2(C_1+C_2)\cos 2t+2(C_1-C_2)\mathrm j\sin2t\\(C_1-C_2)\mathrm j\cos2t-(C_1+C_2)\sin2t\end{bmatrix} z(t)=[2(C1+C2)cos2t+2(C1−C2)jsin2t(C1−C2)jcos2t−(C1+C2)sin2t]
整理后可以发现z1(t),z2(t)z_1(t),z_2(t)z1(t),z2(t)满足下列方程
(z1(t)4C1C2)2+(z2(t)2C1C2)2=1 \left(\frac{z_1(t)}{4\sqrt{C_1C_2}}\right)^2+\left(\frac{z_2(t)}{2\sqrt{C_1C_2}}\right)^2=1 (4C1C2z1(t))2+(2C1C2z2(t))2=1
这是一个以原点为中心的椭圆方程,说明z1(t),z2(t)z_1(t),z_2(t)z1(t),z2(t)在相平面中沿着椭圆的轨迹运行
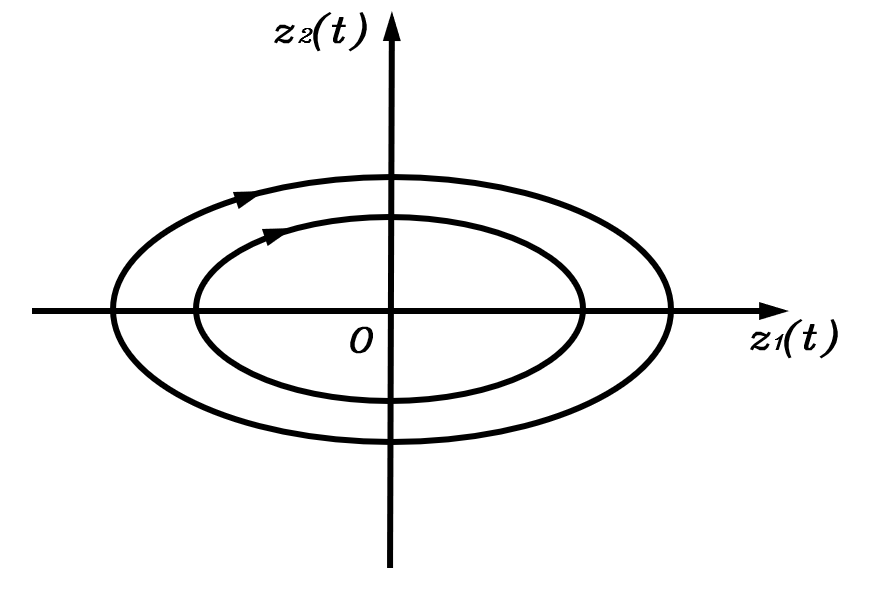
相轨迹的运动方向可以通过在坐标轴上选取一个点分析其各状态变量的导数正负来判断。其中位于椭圆中心的平衡点称为中心点,相轨迹围绕该点做椭圆运动。


















 6万+
6万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









