







1 单位稳定与非稳定运放
单位增益稳定运算放大器在常见的 G = +1 配置时是稳定的,它将输出信号完全返回到反相输入。
欠补偿运算放大器具有较小的补偿电容器,可产生更宽的增益带宽 (GBW) 和更快的转换速率。更高的速度通常要求更高的功率,同一个基础运算放大器可能在以相同的电流运行时速度快很多。但它们不是单位增益稳定的,它们必须用于远大于单位增益的噪声增益中。
图1显示了理想化单位增益稳定运算放大器和欠补偿运算放大器对的增益与频率图的关键部分。欠补偿运放的GBW是单位稳定运放的五倍(10MHz 比 2MHz)。请注意,单位增益稳定运算放大器的单位增益带宽稍低于其 GBW,这是常见的现象。欠补偿放大器的单位增益带宽是其 GBW 的一半。不能使该运算放大器的噪声增益接近单位增益带宽,因为在 3MHz 的第二个极点会极大地影响这个区域的增益/相位行为,相补角会相当小或者不存在。
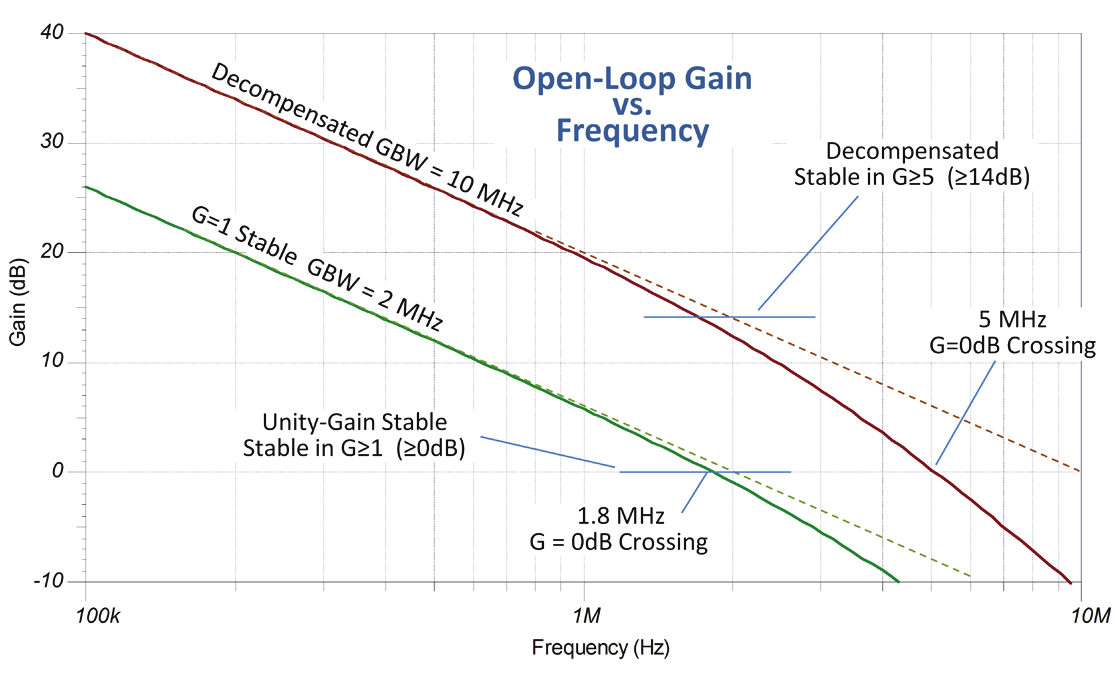
图1
欠补偿运算放大器好像有一些神秘,使得一些用户不能确定它们的电路是否稳定。图2a 显示了一个常见的错误,尽管该运算放大器以 -10 的信号增益进行连接,但反馈电容器在高频率下使响应逐渐降低。在需要考虑稳定性问题的高频率下,该电容可以是一个虚拟短路。对于平坦增益,可以使用较小的反馈电容器来补偿反馈网络,但但较大的电容器,会使响应逐渐降低;这肯定会带来问题。同样地,图2b 中的多反馈滤波器会带来问题,无论滤波器的低频增益是多少都是如此。积分器(图2c)是另一个不适用于欠补偿运算放大器的应用。

图2
2 反相衰减器G=0.1是否稳定
单位增益稳定运算放大器在增益为一或更高时是稳定的,而增益小于一是稳定的吗?
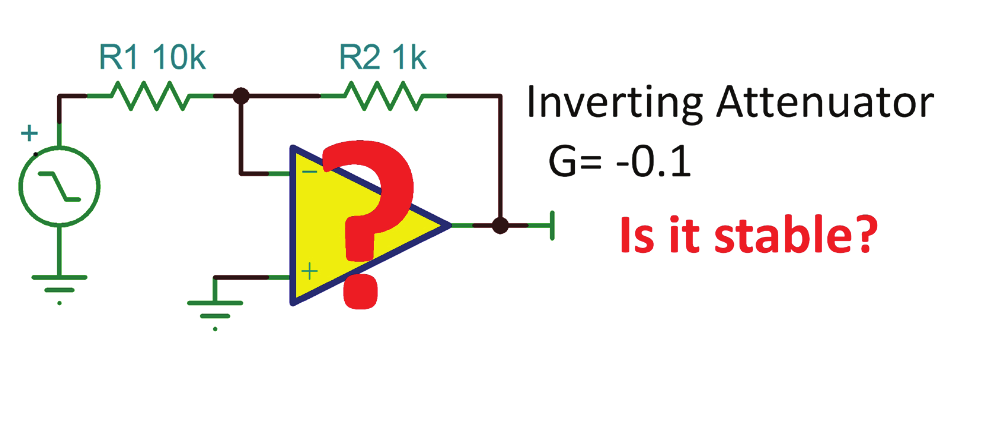
图3
答案是反向衰减器是稳定的!其中的原因可以通过几种方法来分析该问题。
如果 G = –0.1 是不稳定的,那么更低的增益应该会更加糟糕。让我们画一个电路:一个具有 1Ω 反馈电阻器的单位增益放大器,如图 4中所示。然后考虑形成输入电阻器 R1 = 10 GΩ 的可能电路板泄漏。这是一个以极低的反相增益放大的杂散“输入信号”。它是否不稳定?当然是稳定的!
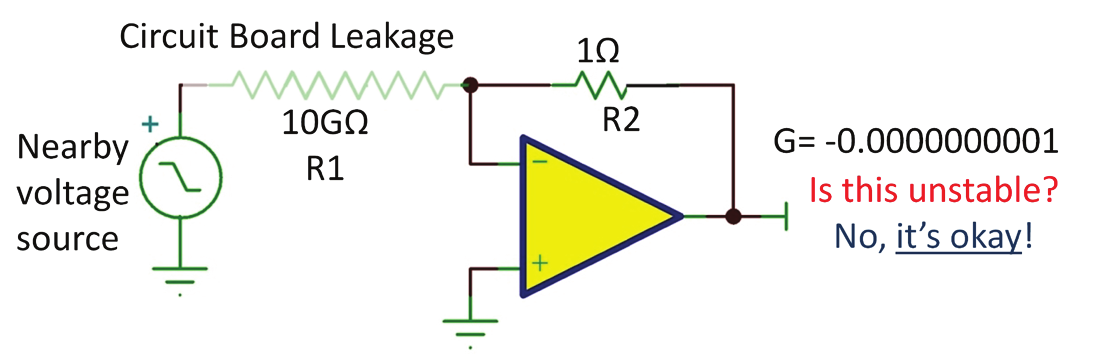
图4
考虑与有多少输出信号反馈到反相输入相关的运算放大器稳定性,该反馈因子称为 β。在单位增益中,所有输入电压都返回到反相输入中,因此 β 为一。图 4 中的示例与几乎所有反馈到反相输入的输出信号在本质上是相同的。
图 5a 显示了反相放大器,图 5b 显示了同相放大器。这些电路是相同的;输入信号施加到不同的节点。两个电路将相同量的输出信号返回到反相输入,因此其稳定性行为是相同的(β 是相同的)。
运算放大器专家还使用术语“噪声增益”,之所以这么命名,是因为运算放大器的电压噪声按照该因数放大到输出中,这是另一种量化反馈的方式。易于振荡或不稳定的运算放大器电路是由其内部放大并反馈到反相输入的噪声引起的,反相放大器(图 5a)具有相同的噪声增益 β,因此具有与其同相表亲相同的稳定性行为,即使输入信号增益不同也是如此。
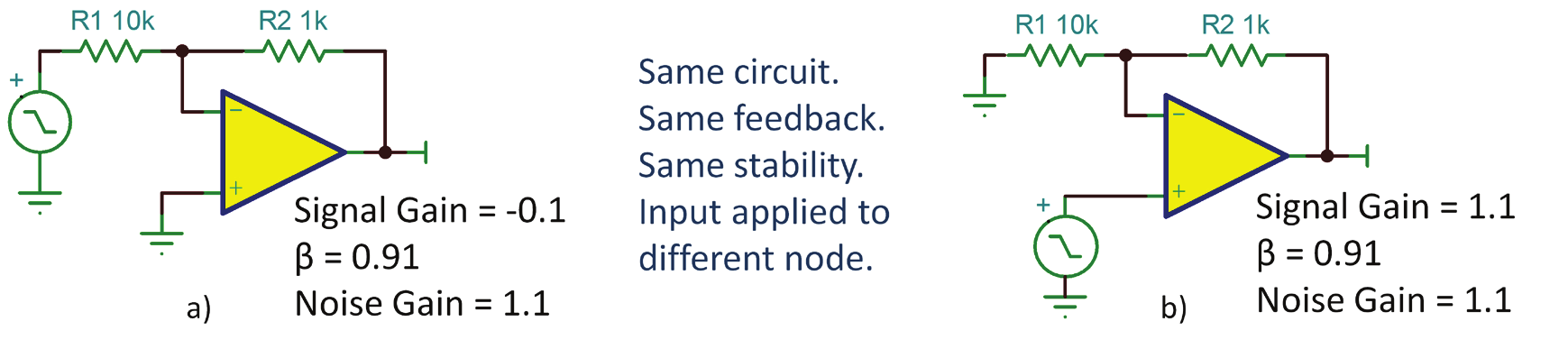
图5
当然,对于反相衰减器的振荡或不稳定,存在其他可能的原因。电容性负载、过高的电阻器值或反相输入端的过大电容可能会导致不稳定。但这些与基本反相衰减器配置是不相关的,对反相衰减器的“危险”误解一直存在着。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











