关于ros编译工程出现很多“未定义的引用”问题解决
最新推荐文章于 2024-03-21 20:17:12 发布





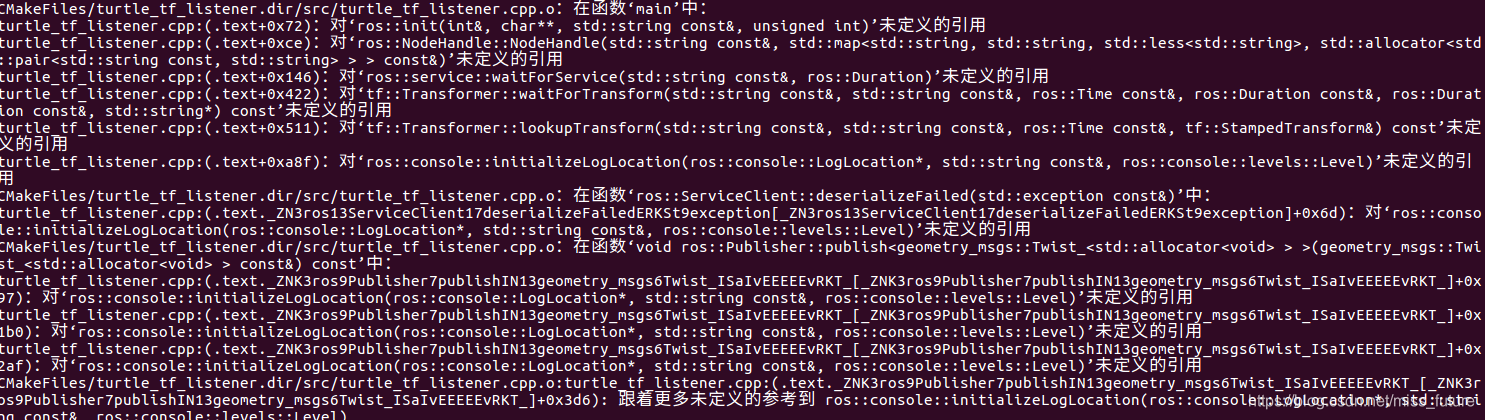
 本文针对ROS编译工程时出现的“未定义的引用”问题进行了解析,指出这可能由gcc版本不匹配引起。提供了解决方案,即通过重新安装gcc和g++来修复,并建议在新的工作空间中重新编译。
本文针对ROS编译工程时出现的“未定义的引用”问题进行了解析,指出这可能由gcc版本不匹配引起。提供了解决方案,即通过重新安装gcc和g++来修复,并建议在新的工作空间中重新编译。
本文针对ROS编译工程时出现的“未定义的引用”问题进行了解析,指出这可能由gcc版本不匹配引起。提供了解决方案,即通过重新安装gcc和g++来修复,并建议在新的工作空间中重新编译。
本文针对ROS编译工程时出现的“未定义的引用”问题进行了解析,指出这可能由gcc版本不匹配引起。提供了解决方案,即通过重新安装gcc和g++来修复,并建议在新的工作空间中重新编译。
 3007
2834
525
3007
2834
525

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言