 堆与优先级队列
堆与优先级队列





堆(也指优先级队列)是一种专门的二叉树。具体地说,它是一个完整的(conplete)二叉树。里面的key必须满足堆的特性,每个节点的key至少要和它的子节点的key一样大。
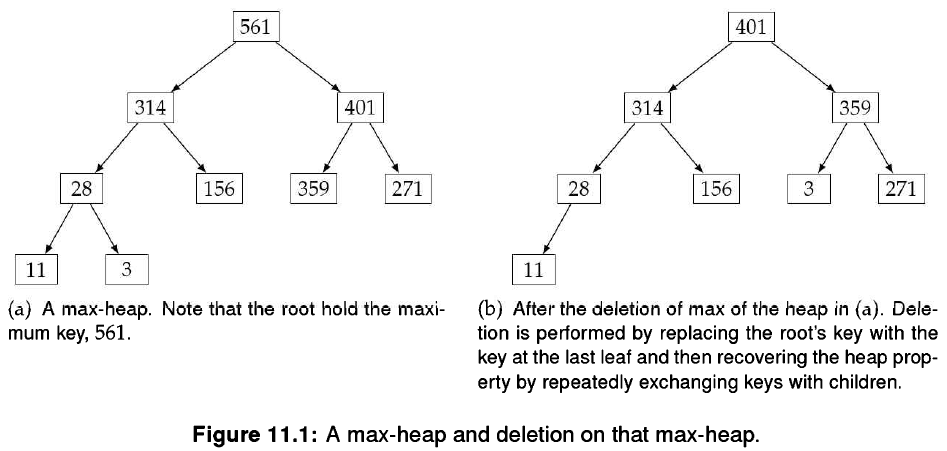
看图11.1(a)中的最大堆的例子。一个最大堆可以由数组来实现,index为i的节点的子节点的index为2i+1和2i+2。代表11.1(a)中最大堆的数组为{561,341,401,28,156,359,271,11,3}。
最大堆支持O(logn)时间的插入,O(1)的时间查找最大元素,O(logn)的时间删除最大元素。抽出最大的元素的操作被定义为删除并返回最大值元素。看图11.1(b)删除最大元素的例子。搜索任意的key有O(n)的时间复杂度。
最小堆是一个完全对称的数据结构,支持O(1)的时间查找最小元素。
当我们不需要对任意元素快速地的查找和删除,只关心最大或者最小的元素时用堆。
当我们需要计算容器中前k个最大元素或者前k个最小元素时,堆是一个很好的选择。对于前者,用最小堆,对于后者,用最大堆。
C++中堆的实现指的是优先级队列,priority_queue类。关键的函数有push("Gauss")(或者emplace("Gauss")), top(), 和pop()。对空的堆调用top()和pop()会抛出异常。
我们可以对堆的构造函数指定一个自定义的比较器。

















 12万+
12万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









