




 本文通过COMSOL仿真研究PID控制器在伺服电机中的应用,探讨比例、积分、微分常数对控制性能的影响。通过建立伺服电机模型,展示不同参数下电机的动态响应,说明积分和微分控制器如何改善系统性能并减少稳态误差。
本文通过COMSOL仿真研究PID控制器在伺服电机中的应用,探讨比例、积分、微分常数对控制性能的影响。通过建立伺服电机模型,展示不同参数下电机的动态响应,说明积分和微分控制器如何改善系统性能并减少稳态误差。
关注公众号→【COMSOL仿真交流】←更多精彩内容
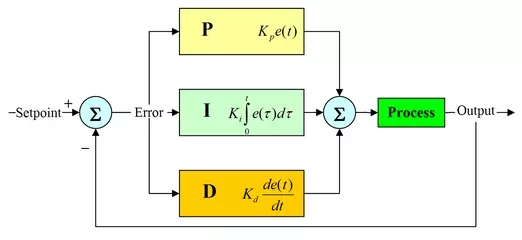
PID控制器PID控制器的控制量由误差的比例(P),积分(I)、微分(D)的线性组合组成。
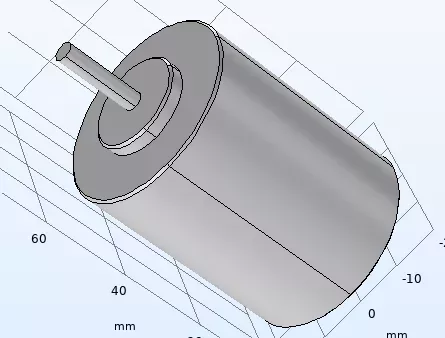
在COMSOL中进行PID控制器的仿真PID控制器的在使用过程中,最难的,也是唯一需要确定的就是比例常数,积分常数和微分常数,往往不同的参数对控制性能有着巨大的影响,而且,随着工作状态的变化,控制参数往往需要跟踪调整。借助有限元仿真分析软件,控制工程师能够提前优化PID控制器的性能。1PID伺服电机模型伺服电机一般内置PID控制器,本例中,我们选取直线伺服电机作为研究对象。电机几何模型如下图所示,电机动子部分和定子部分设置了接触对,采用多体动力学模块分析,静子和动子之间设置圆柱关节。圆柱关节设置为弹性关节,并设置弹性系数和阻尼系数。
关节控制力由比例,积分,微分控制器叠加组成。对于比例控制器,可简单设置为;
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2053
2053

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









