




 本文解析了一篇关于Crowd-aware Robot Navigation的研究论文,该研究运用注意力机制的深度强化学习方法,探讨了机器人如何在人群中智能导航。论文提出将人与机器人的交互以及人与人之间的交互纳入强化学习模型,并通过self-attention来理解环境中的动态关系。代码框架包括模仿学习和强化学习两个部分。
本文解析了一篇关于Crowd-aware Robot Navigation的研究论文,该研究运用注意力机制的深度强化学习方法,探讨了机器人如何在人群中智能导航。论文提出将人与机器人的交互以及人与人之间的交互纳入强化学习模型,并通过self-attention来理解环境中的动态关系。代码框架包括模仿学习和强化学习两个部分。
Crowd-Robot Interaction:Crowd-aware Robot Navigation with Attention-based Deep Reinforcement Learning 论文解析
Crowd-Robot Interaction:Crowd-aware Robot Navigation with Attention-based Deep Reinforcement Learning 论文解读
近期精读了一篇强化学习论文,在此分享一下,相互学习。
论文亮点
逾越人机交互到人群与机器人交互.
- 使用attention机制,重新定义了人与机器人之间的交互对;
- 在强化学习框架中包含了人机交互和人人交互的联合模型;
问题模型
这篇文章中,机器人考虑穿过n个人的导航任务,这个场景被描述成一个强化学习序列决策问题。每一个智能体或机器人都有自己的位置速度信息以及目标点的位置和偏好速度。强化学习中的state是一个联合state里面包含机器人的state和环境中人的state。最优策略期盼得到最优的回报return,表述如下:
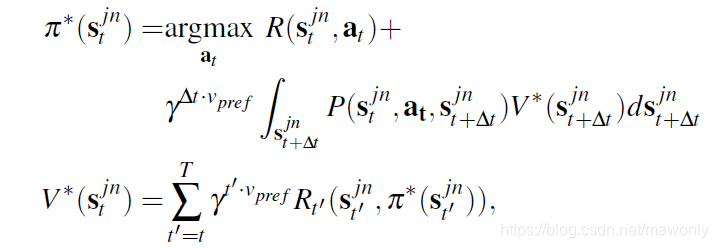
Rt表示在t时刻所获得的奖励,V星是最优价值函数,Vpref是折扣系数中的正则项。
reward函数如下:

dt是机器人和人
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1106
1106

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









