



✅作者简介:热爱数据处理、建模、算法设计的Matlab仿真开发者。
🍎更多Matlab代码及仿真咨询内容点击 🔗:Matlab科研工作室
🍊个人信条:格物致知。
🔥 内容介绍
复杂山地环境以其独特而复杂的地形地貌,给无人机的飞行带来了极大的挑战。山地通常海拔较高,地势起伏剧烈,山峰、山谷、峡谷等地形交错纵横 。其地形的垂直落差可能从几百米到数千米不等,例如喜马拉雅山脉,平均海拔超过 6000 米,在这样的区域,无人机需要具备强大的爬升和下降能力才能适应高度的急剧变化。
山地中的坡度也是不可忽视的因素,陡峭的山坡坡度常常超过 60 度甚至更陡,这对无人机的飞行姿态控制提出了严苛要求。无人机在飞行过程中,一旦遭遇强风,在陡峭山坡附近,很容易因气流的不稳定而偏离预定航线,甚至面临失控的危险。而且,山地中往往植被茂密,森林覆盖率在某些区域可达 80% 以上,高大的树木不仅阻挡了无人机的飞行路径,还会对其视觉感知和 GPS 信号造成干扰,导致定位不准确和导航失误。
除了自然地形和植被,山地中还可能存在各种自然和人为的障碍物,如裸露的岩石、悬崖峭壁以及偶尔出现的建筑物、通信塔等,这些障碍物随机分布,增加了无人机飞行路径规划的复杂性和难度。在进行路径规划时,需要精确地识别和避开这些障碍物,以确保飞行安全。
无人机路径规划作为无人机飞行控制的核心环节,对于保障无人机在复杂山地环境中的安全高效飞行起着决定性作用。合理的路径规划能够使无人机在满足任务需求的前提下,尽可能地避开危险区域和障碍物,选择最优的飞行路线,从而减少飞行风险,提高飞行效率,降低能耗。如果路径规划不合理,无人机可能会陷入危险境地,如与障碍物碰撞、进入强风区或信号盲区等,导致任务失败甚至无人机坠毁,造成巨大的经济损失。因此,研究适用于复杂山地环境的无人机路径规划算法,是推动无人机在山地应用领域发展的关键所在。
减法平均优化算法 SABO 探秘
(一)SABO 诞生背景
减法平均优化算法(Subtraction Average-Based Optimization,SABO)于 2023 年由 Pavel Trojovský 和 Mohammad Dehghani 博士提出 。在优化算法的大家庭中,随着科技的飞速发展,各种复杂的优化问题不断涌现,传统的优化算法在面对高维、多峰、非线性等复杂问题时,往往表现出搜索效率低、容易陷入局部最优等局限性 。为了突破这些困境,研究人员不断探索和创新,SABO 应运而生。它作为一种新型的元启发式算法,在众多优化算法中崭露头角,以其独特的设计理念和高效的搜索机制,为解决复杂优化问题提供了新的思路和方法,被视为解决复杂优化问题的有力工具之一,自诞生以来,受到了学术界和工程界的广泛关注,众多学者对其进行研究和改进,推动其在不同领域的应用和发展。
SABO 在复杂山地危险模型无人机路径规划中的应用
(一)复杂山地危险模型构建
复杂山地危险模型的构建是无人机路径规划的基础,它为后续的路径搜索和优化提供了准确的环境信息。数字高程模型(DEM)数据是构建复杂山地危险模型的重要依据 。DEM 数据通过对地形的高程测量,能够精确地反映出山地的起伏状况 。通过对 DEM 数据进行处理,可以获取山地的坡度、坡向等信息 。利用地理信息系统(GIS)软件,如 ArcGIS,导入 DEM 数据,通过特定的算法计算出每个栅格单元的坡度和坡向 。坡度信息可以帮助判断无人机在飞行过程中需要克服的重力分量,坡向信息则有助于分析不同方向上的地形遮挡和光照条件,这些都与飞行的安全性和能源消耗密切相关 。
在山地环境中,障碍物的存在是不可忽视的因素 。为了准确表示障碍物,需要对其进行分类和建模 。对于自然障碍物,如高大的树木、突出的岩石等,可以通过实地测量、激光雷达扫描或高分辨率卫星图像解译等方式获取其位置和形状信息 。将这些障碍物的信息以三维模型的形式嵌入到 DEM 数据所构建的地形模型中,例如,使用三维建模软件将树木建模为圆柱体,岩石建模为不规则的多边形体,并根据测量得到的位置信息放置在相应的地形位置上 。对于人为障碍物,如通信塔、建筑物等,可通过查阅相关地图资料、城市规划数据或实地调查来确定其位置和尺寸 。在模型中,将通信塔建模为垂直的柱状结构,建筑物建模为长方体或其他符合其实际形状的几何体,并根据实际位置进行准确放置 。
除了地形和障碍物,还需要对山地中的危险区域进行划分和评估 。危险区域可能包括陡峭的悬崖边缘、强风区域、电磁干扰区域等 。对于悬崖边缘,可根据 DEM 数据计算出地形的坡度和曲率,当坡度超过一定阈值(如 70 度)且曲率较大时,可判定为悬崖边缘区域 。对于强风区域,可结合气象数据,如风速和风向的历史记录,利用气象模型分析出山地中容易出现强风的区域 。电磁干扰区域则可通过对周边电子设备分布、通信基站位置等信息的分析,结合电磁传播模型来确定 。为每个危险区域赋予相应的风险等级,例如,将悬崖边缘和强风区域设定为高风险等级,电磁干扰区域根据干扰强度设定为中风险或低风险等级 。在路径规划过程中,无人机需要尽量避开高风险区域,对于中低风险区域,则根据任务需求和无人机的性能进行综合考虑 。通过整合 DEM 数据、障碍物信息和危险区域划分,构建出包含地形、障碍物和风险等级信息的三维复杂山地危险模型 。这个模型以数字化的形式全面、准确地描述了山地环境的特征和潜在危险,为无人机路径规划算法提供了详细的环境信息,使得路径规划能够在真实的山地场景下进行,有效提高了路径规划的准确性和实用性 。
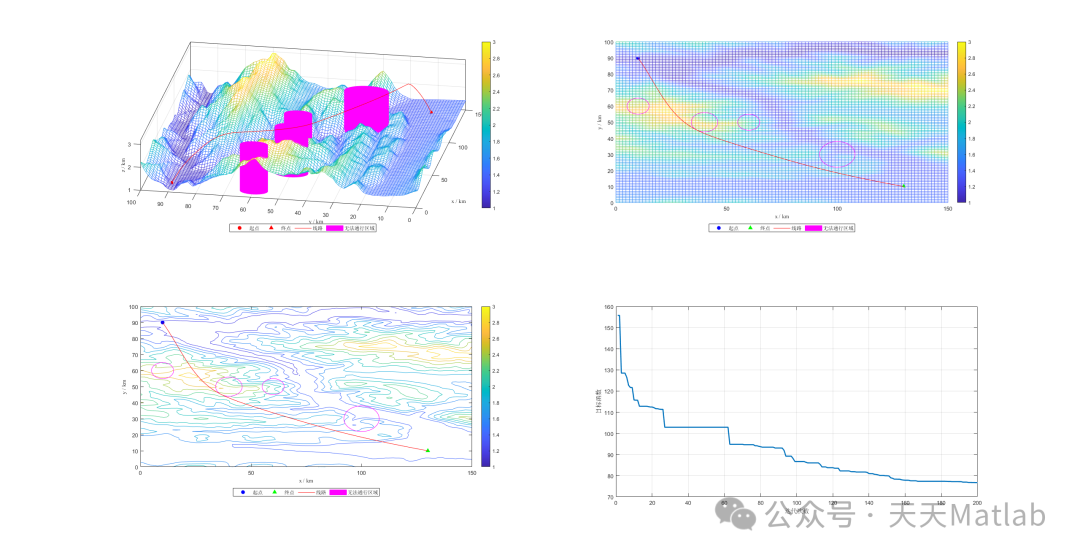
⛳️ 运行结果
🔗 参考文献
[1] 李敏健.基于BIM的"无人机+RTK"在复杂山地项目施工技术应用[J].广州建筑, 2023, 51(3):33-36.
[2] 王海立,王永生,武威威,等.高原双复杂山地近地表建模技术研究[J].科技创新与应用, 2022, 12(33):60-62.DOI:10.19981/j.CN23-1581/G3.2022.33.015.
[3] 姚红云,林杰,谈进辉.基于复杂网络理论的山地城市交通网络模型可靠度研究[C]//中国系统工程学会学术年会.2014.
🎈 部分理论引用网络文献,若有侵权联系博主删除
本主页优快云博客涵盖以下领域:
🌈 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱调度、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题、港口调度、港口岸桥调度、停机位分配、机场航班调度、泄漏源定位
🌈 机器学习和深度学习时序、回归、分类、聚类和降维
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN|TCN|GCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类


















 1140
1140

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











