



✅作者简介:热爱科研的Matlab仿真开发者,擅长数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知,求助可私信。
🔥 内容介绍
无人机因其灵活性、机动性和成本效益等优势,近年来在各个领域得到广泛应用,如航拍、物流、农业监测等。而四旋翼无人机作为其中最常见的一种类型,其控制系统的设计对于无人机的稳定性和可靠性至关重要。本文将以鹈鹕四旋翼无人机为例,探讨其PD控制器设计,并实现期望高度、横滚、俯仰和偏航角的控制,并附上相应的Matlab代码。
一、 鹈鹕四旋翼无人机系统模型
鹈鹕四旋翼无人机是一个典型的非线性、多输入多输出系统,其动力学模型可以描述为:
1.1 运动学模型
[x_dot, y_dot, z_dot] = R*[u, v, w]
其中,[x, y, z] 为无人机在惯性坐标系下的位置坐标,[u, v, w] 为无人机在机体坐标系下的速度,R 为机体坐标系到惯性坐标系的旋转矩阵。
1.2 动力学模型:
[u_dot, v_dot, w_dot] = [f_x, f_y, f_z] - [g*sin(theta), 0, g*cos(theta)]
[p_dot, q_dot, r_dot] = [l, m, n]
其中,[f_x, f_y, f_z] 为机体坐标系下的合力,g 为重力加速度,[theta, phi, psi] 为俯仰角、横滚角和偏航角,[p, q, r] 为角速度,[l, m, n] 为机体坐标系下的力矩。
1.3 输入输出关系:
[f_x, f_y, f_z, l, m, n] = f(u, v, w, p, q, r, T1, T2, T3, T4)
其中,[T1, T2, T3, T4] 为四个电机提供的推力。
二、 PD控制器设计
PD控制器是常用的控制算法,其优点是结构简单,易于实现,并且能够提供良好的动态性能。
2.1 高度控制:
高度控制的目标是使无人机能够稳定地悬停在期望高度。
T = K_p*(h_d - h) + K_d*(h_d_dot - h_dot)
其中,h_d 为期望高度,h 为实际高度,h_d_dot 为期望高度速度,h_dot 为实际高度速度,K_p 和 K_d 分别为比例系数和微分系数。
2.2 横滚、俯仰和偏航角控制:
横滚、俯仰和偏航角控制的目标是使无人机能够稳定地保持期望姿态。
phi_c = K_p_phi*(phi_d - phi) + K_d_phi*(phi_d_dot - phi_dot)
theta_c = K_p_theta*(theta_d - theta) + K_d_theta*(theta_d_dot - theta_dot)
psi_c = K_p_psi*(psi_d - psi) + K_d_psi*(psi_d_dot - psi_dot)
其中,phi_d, theta_d, psi_d 分别为期望横滚角、俯仰角和偏航角,phi, theta, psi 分别为实际横滚角、俯仰角和偏航角,phi_d_dot, theta_d_dot, psi_d_dot 分别为期望横滚角速度、俯仰角速度和偏航角速度,phi_dot, theta_dot, psi_dot 分别为实际横滚角速度、俯仰角速度和偏航角速度,K_p_phi, K_d_phi, K_p_theta, K_d_theta, K_p_psi, K_d_psi 分别为比例系数和微分系数。
三、 Matlab代码实现
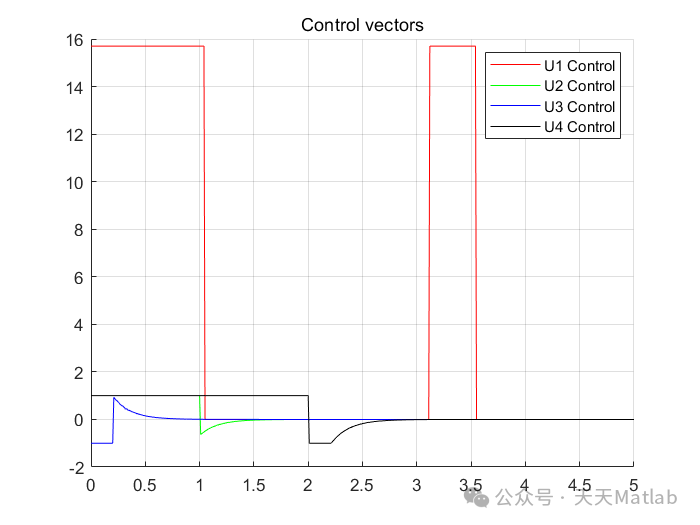
以下代码为鹈鹕四旋翼无人机PD控制器Matlab实现示例:
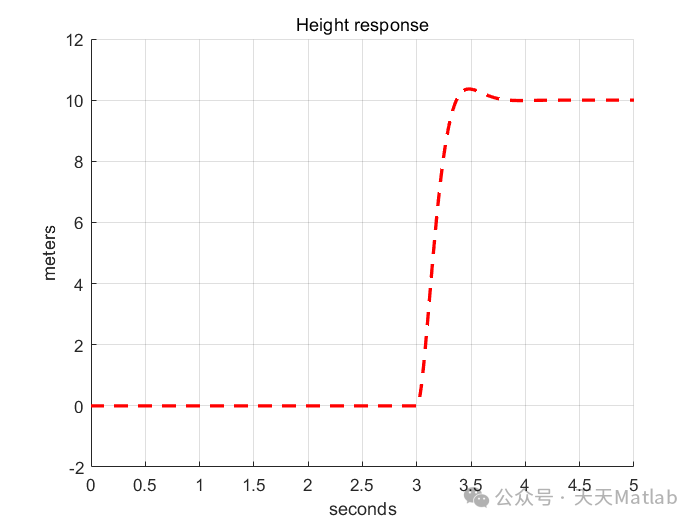
T = K_p_h*(h_d - h) + K_d_h*(h_d_dot - h_dot);
title('无人机高度控制');
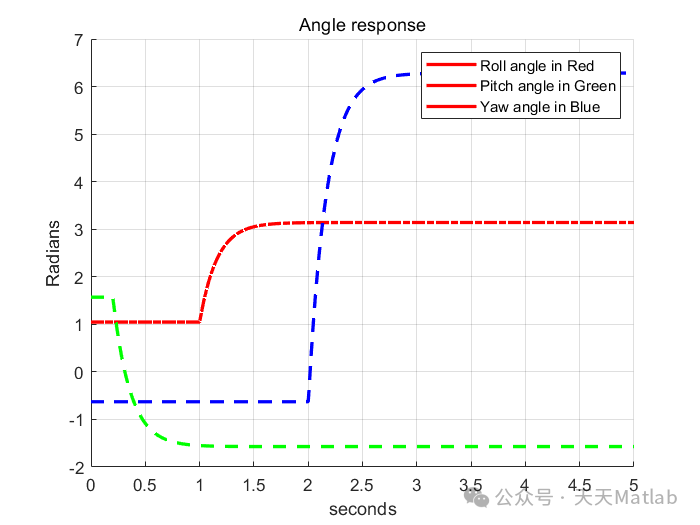
subplot(4,1,2);
plot(t, phi_data);
ylabel('横滚角 (rad)');
title('无人机横滚角控制');
subplot(4,1,3);
plot(t, theta_data);
ylabel('俯仰角 (rad)');
title('无人机俯仰角控制');
subplot(4,1,4);
plot(t, psi_data);
ylabel('偏航角 (rad)');
title('无人机偏航角控制');
xlabel('时间 (s)'); 四、 结论
本文以鹈鹕四旋翼无人机为例,介绍了PD控制器设计方法,并实现了期望高度、横滚、俯仰和偏航角的控制。Matlab代码示例展示了PD控制器的具体实现过程。需要注意的是,实际控制过程中还需要考虑其他因素,例如风力、电机故障等,并进行相应的补偿和处理。
五、 未来展望
未来可以进一步研究更复杂的控制算法,例如PID控制器、模糊控制等,以提升无人机控制性能。此外,也可以尝试加入传感器融合技术,提高无人机定位精度和状态估计的准确性。最终目标是实现无人机自主飞行,并使其能够在各种复杂环境中安全可靠地完成任务。
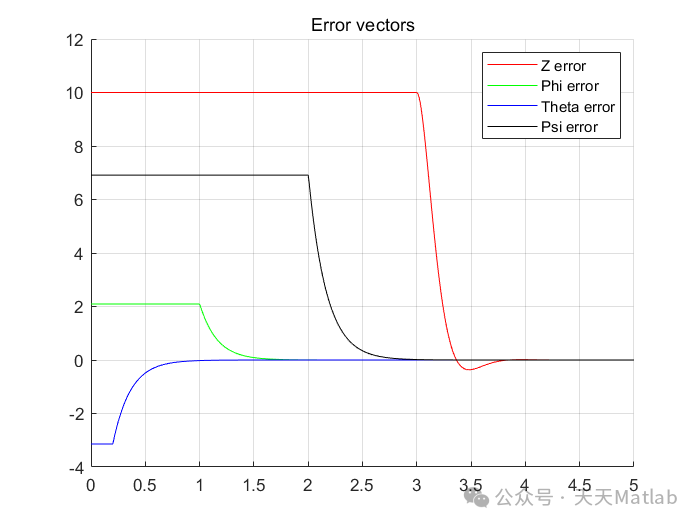
⛳️ 运行结果
🔗 参考文献
🎈 部分理论引用网络文献,若有侵权联系博主删除
👇 关注我领取海量matlab电子书和数学建模资料
🌈 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱调度、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题、港口调度、港口岸桥调度、停机位分配、机场航班调度、泄漏源定位
🌈 机器学习和深度学习时序、回归、分类、聚类和降维
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN|TCN|GCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类


















 4773
4773

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











