




✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
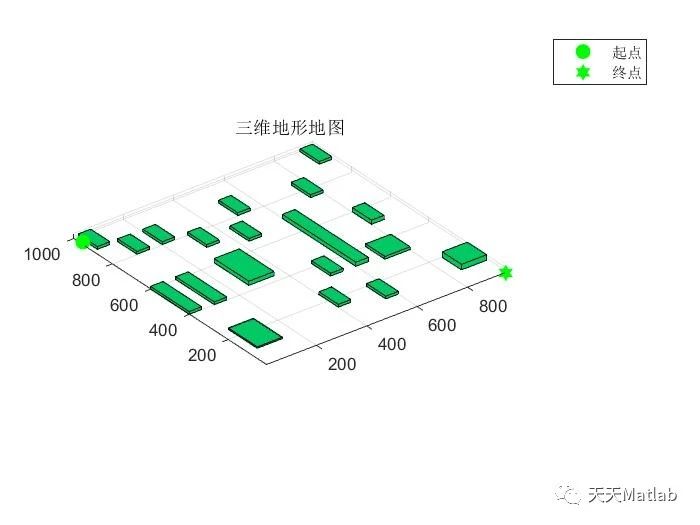
随着科技的不断发展,无人机技术在军事、民用和商业领域得到了广泛的应用。然而,无人机在复杂地形中的飞行仍然存在着诸多挑战,如何实现无人机的自主避障和三维航迹规划成为了当前研究的热点之一。本文将探讨基于帝国企鹅算法AFO实现复杂地形的无人机避障三维航迹规划的相关技术和方法。
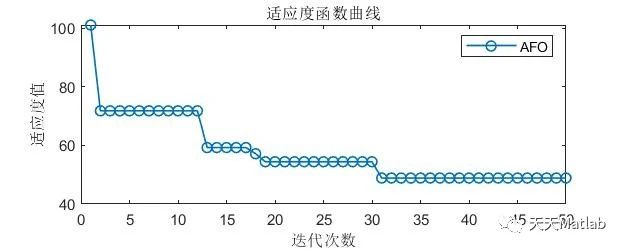
首先,无人机在复杂地形中的飞行需要克服地形起伏、障碍物和风等因素的影响,因此避障算法的设计至关重要。帝国企鹅算法AFO是一种基于仿生学原理的优化算法,其模拟了帝国企鹅在觅食过程中的行为,具有较强的全局搜索能力和收敛速度。通过将AFO算法应用于无人机避障问题中,可以有效地寻找到最优的避障路径,提高无人机的飞行效率和安全性。
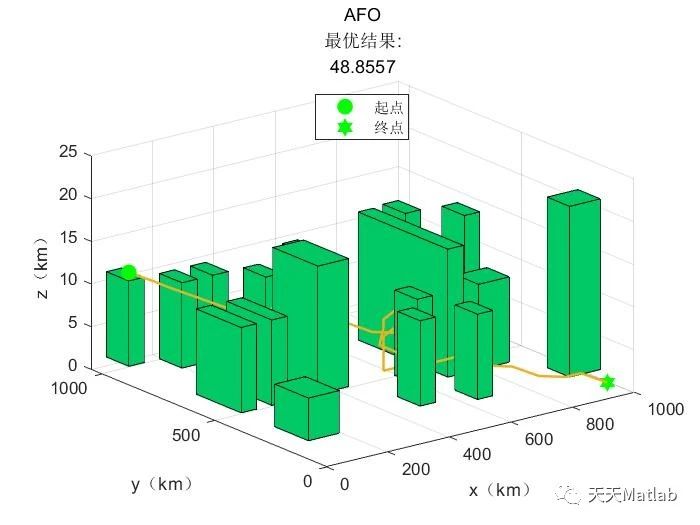
其次,三维航迹规划是无人机飞行的关键技术之一,它需要考虑到无人机的动力学特性、飞行环境和任务需求等多方面因素。基于帝国企鹅算法的三维航迹规划方法可以充分考虑到地形的复杂性和无人机的飞行特性,实现对无人机飞行轨迹的精确规划和优化。同时,AFO算法还可以根据实时环境信息进行动态调整,确保无人机在复杂地形中能够快速、安全地完成飞行任务。
最后,基于帝国企鹅算法AFO实现复杂地形的无人机避障三维航迹规划还需要考虑到实际应用中的可行性和稳定性。在实际飞行中,无人机需要通过传感器获取地形和障碍物的信息,并实时更新航迹规划结果。因此,如何将AFO算法与传感器融合,并实现实时的避障和航迹规划,是当前研究中亟待解决的问题之一。
综上所述,基于帝国企鹅算法AFO实现复杂地形的无人机避障三维航迹规划是一个复杂而具有挑战性的课题,它涉及到算法优化、飞行动力学和实时控制等多个领域。随着科技的不断进步和研究的深入,相信这一领域的研究将会取得更加显著的成果,为无人机在复杂地形中的应用提供更加可靠的技术支持。
📣 部分代码
function DrawPic(result1,data,str)figureplot3(data.S0(:,1)*data.unit(1),data.S0(:,2)*data.unit(2),data.S0(:,3)*data.unit(3),'o','LineWidth',1.5,...'MarkerEdgeColor','g',...'MarkerFaceColor','g',...'MarkerSize',8)hold onplot3(data.E0(:,1)*data.unit(1),data.E0(:,2)*data.unit(2),data.E0(:,3)*data.unit(3),'h','LineWidth',1.5,...'MarkerEdgeColor','g',...'MarkerFaceColor','g',...'MarkerSize',8)plot3(result1.path(:,1).*data.unit(1),result1.path(:,2).*data.unit(2),result1.path(:,3).*data.unit(3),'-','LineWidth',1.5,...'MarkerEdgeColor','g',...'MarkerFaceColor','g',...'MarkerSize',10)for i=1:data.numObstaclesx=1+data.Obstacle(i,1);y=1+data.Obstacle(i,2);z=1+data.Obstacle(i,3);long=data.Obstacle(i,4);wide=data.Obstacle(i,5);pretty=data.Obstacle(i,6);x0=ceil(x/data.unit(1))*data.unit(1);y0=ceil(y/data.unit(2))*data.unit(2);z0=ceil(z/data.unit(3))*data.unit(3);long0=ceil(long/data.unit(1))*data.unit(1);wide0=ceil(wide/data.unit(2))*data.unit(2);pretty0=ceil(pretty/data.unit(3))*data.unit(3);[V,F] = DrawCuboid(long0, wide0, pretty0, x0,y0,z0);endlegend('起点','终点','location','north')grid on%axis equalxlabel('x(km)')ylabel('y(km)')zlabel('z(km)')title([str, '最优结果:', num2str(result1.fit)])% figure% plot3(data.S0(:,1)*data.unit(1),data.S0(:,2)*data.unit(2),data.S0(:,3)*data.unit(3),'o','LineWidth',2,...% 'MarkerEdgeColor','r',...% 'MarkerFaceColor','r',...% 'MarkerSize',10)% hold on% plot3(data.E0(:,1)*data.unit(1),data.E0(:,2)*data.unit(2),data.E0(:,3)*data.unit(3),'h','LineWidth',2,...% 'MarkerEdgeColor','r',...% 'MarkerFaceColor','r',...% 'MarkerSize',10)% plot3(result1.path(:,1).*data.unit(1),result1.path(:,2).*data.unit(2),result1.path(:,3).*data.unit(3),'-','LineWidth',2,...% 'MarkerEdgeColor','k',...% 'MarkerFaceColor','r',...% 'MarkerSize',10)% for i=1:data.numObstacles% x=1+data.Obstacle(i,1);% y=1+data.Obstacle(i,2);% z=1+data.Obstacle(i,3);% long=data.Obstacle(i,4);% wide=data.Obstacle(i,5);% pretty=data.Obstacle(i,6);%% x0=ceil(x/data.unit(1))*data.unit(1);% y0=ceil(y/data.unit(2))*data.unit(2);% z0=ceil(z/data.unit(3))*data.unit(3);% long0=ceil(long/data.unit(1))*data.unit(1);% wide0=ceil(wide/data.unit(2))*data.unit(2);% pretty0=ceil(pretty/data.unit(3))*data.unit(3);% [V,F] = DrawCuboid(long0, wide0, pretty0, x0,y0,z0);% end% legend('起点','终点','location','north')% grid on% xlabel('x(km)')% ylabel('y(km)')% zlabel('z(km)')% title([str, '最优结果:', num2str(result1.fit)])end
⛳️ 运行结果
🔗 参考文献
[1] 胡观凯,钟建华,李永正,等.基于IPSOGA算法的无人机三维路径规划[J].现代电子技术, 2023, 46(7):115-120.
[2] 黄鹤,高永博,茹锋,等.基于自适应黏菌算法优化的无人机三维路径规划[J].上海交通大学学报, 2023(010):057.


















 1583
1583

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











