




✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
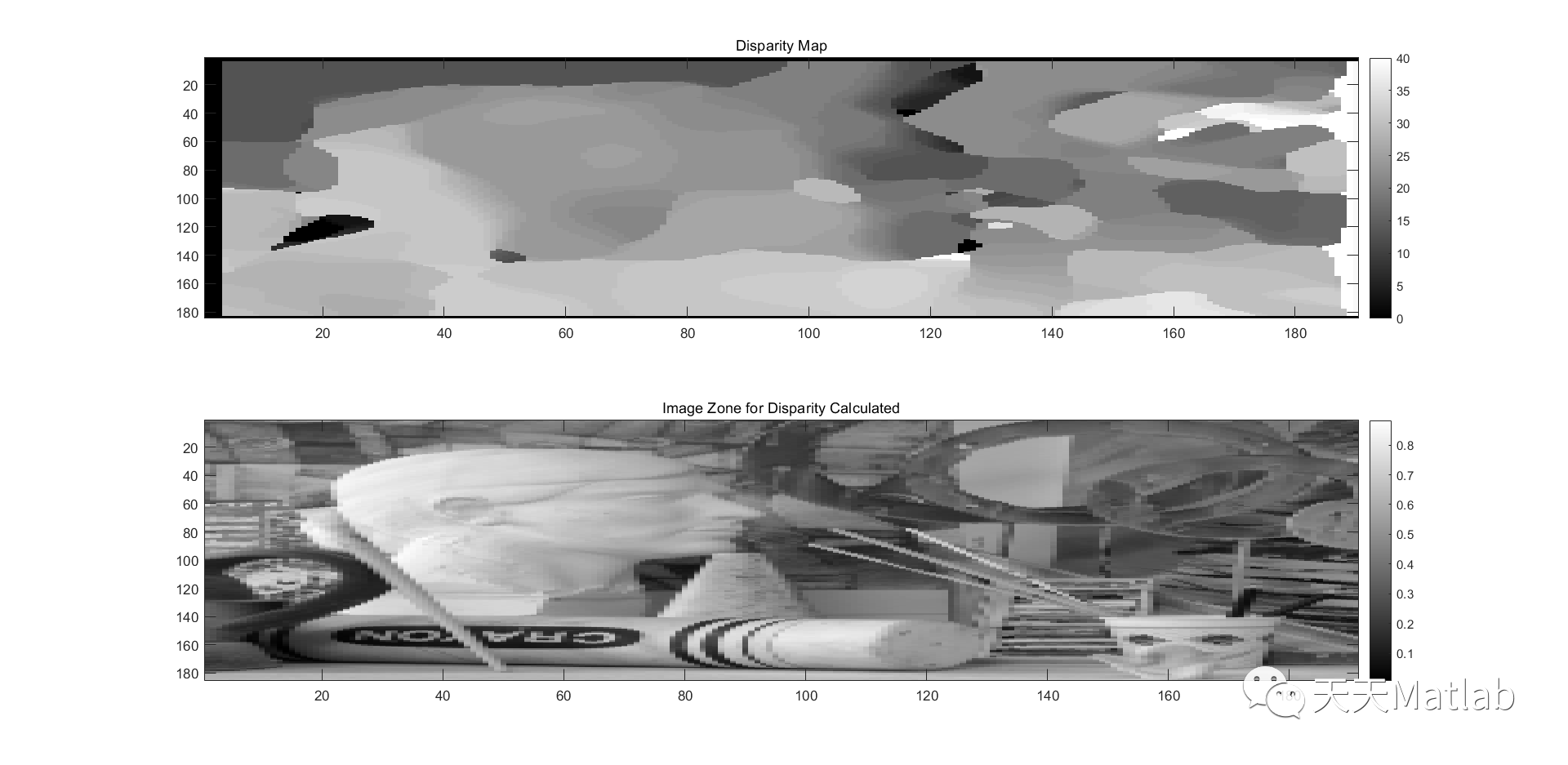
在计算机视觉领域,立体匹配是一项重要的任务,它旨在从一对彩色图像中获取对应点的深度信息。这项任务对于许多应用来说至关重要,例如三维重建、虚拟现实和自动驾驶等。在立体匹配任务中,区域基的立体匹配算法是一种常用的方法,它通过将图像分成不同的区域来提高匹配的准确性和效率。
区域基的立体匹配算法的基本思想是将图像分割成不同的区域,并在每个区域内进行匹配。这种方法的优势在于它可以利用图像中的局部信息来进行匹配,从而提高了匹配的准确性。此外,通过将图像分割成多个区域,算法可以并行地处理每个区域,从而提高了匹配的效率。
在区域基的立体匹配算法中,常用的技术包括分割、特征提取和匹配。首先,图像被分割成多个区域,通常使用超像素分割算法来实现。然后,在每个区域中提取特征,例如颜色、纹理和边缘等。最后,通过比较两个图像中对应区域的特征来进行匹配,并计算深度值。
在实际应用中,区域基的立体匹配算法面临一些挑战。首先,图像中的纹理和光照变化可能会导致匹配错误。为了解决这个问题,可以使用多种特征来进行匹配,并使用一些优化方法来消除错误的匹配。其次,算法的效率也是一个重要的考虑因素。为了提高匹配的速度,可以使用一些加速技术,例如并行计算和快速搜索等。
近年来,随着深度学习的发展,基于神经网络的立体匹配算法也取得了显著的进展。这些算法通过训练神经网络来学习图像的特征和匹配规则,从而提高了匹配的准确性和鲁棒性。然而,这些算法通常需要大量的训练数据和计算资源,因此在实际应用中可能存在一些限制。
总结而言,区域基的立体匹配算法是一种常用的方法,用于从彩色图像中获取深度信息。通过将图像分割成多个区域,并在每个区域内进行匹配,可以提高匹配的准确性和效率。然而,该算法仍然面临一些挑战,例如纹理和光照变化以及算法的效率。未来,随着技术的进一步发展,我们可以期待更加准确和高效的立体匹配算法的出现。
📣 部分代码
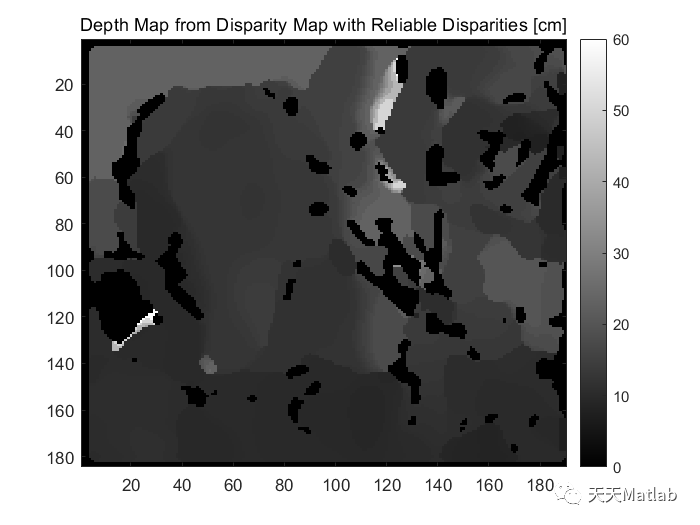
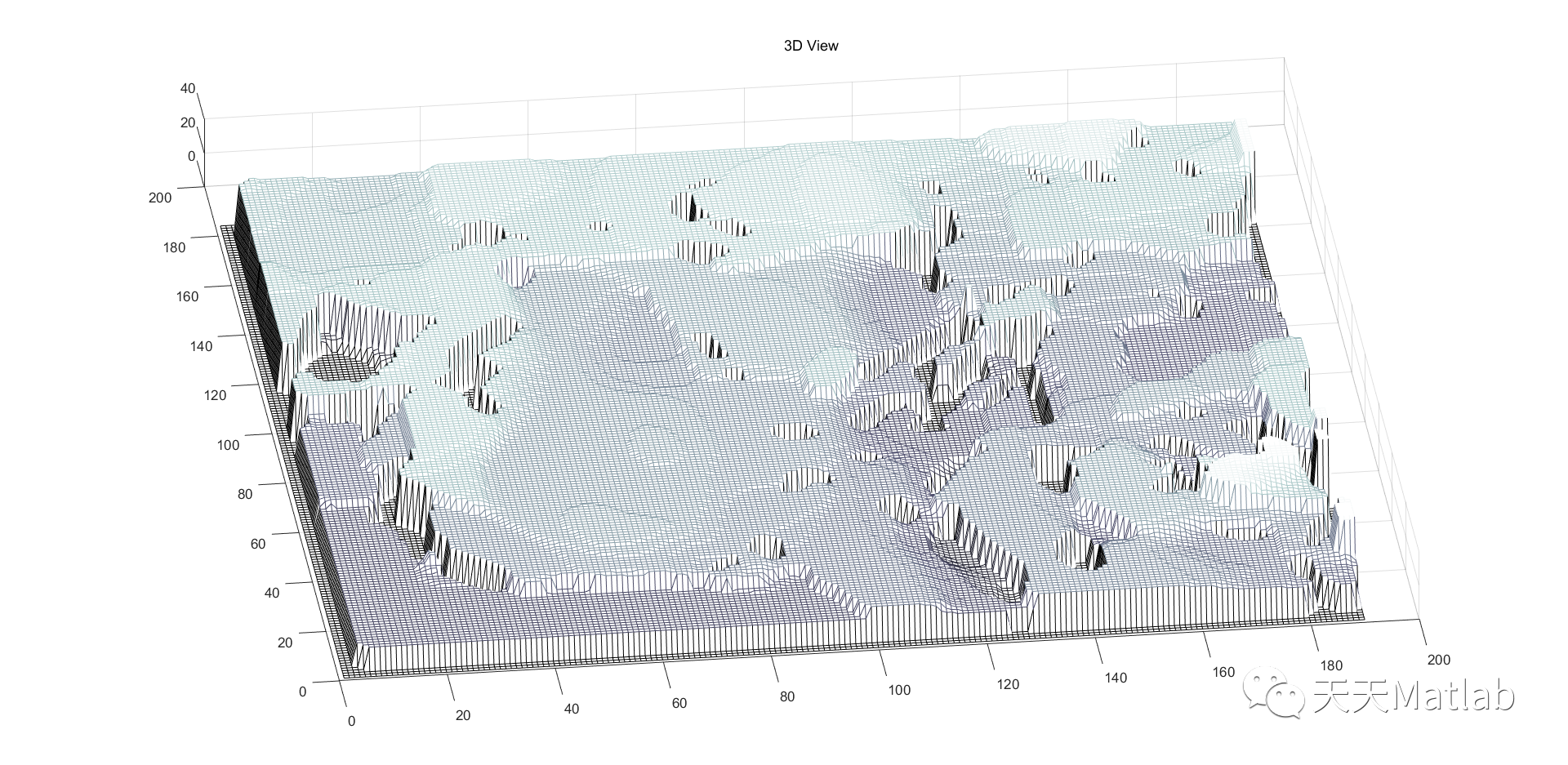
%% extracting calculated zonenx=n-dmax;for k=2:m-1for l=2:nx-1disparityx(k,l)=disparity(k,l);%Edisx(k,l)=Edis(k,l);%regMapx(k,l)=regMap(k,l);XLx(k,l)=XL(k,l);XRx(k,l)=XR(k,l);top=0;for x=k-1:k+1for y=l-1:l+1top=top+(XL(x,y+disparity(k,l),1)-XR(x,y,1))^2+(XL(x,y+disparity(k,l),2)-XR(x,y,2))^2+(XL(x,y+disparity(k,l),3)-XR(x,y,3))^2;endendEd(k,l)=(1/27)*top;endend%calculates error energy treshold for reliablity of disparityToplam=0;for k=1:m-1for l=1:nx-1Toplam=Toplam+Ed(k,l);endend% Error threshold VeVe=Alfa*(Toplam/((m-1)*(nx-1)));EdReliable=Ed;disparityReliable=disparityx;Ne=zeros(m,nx);for k=1:m-1for l=1:nx-1if Ed(k,l)>Ve% sets unreliable disparity to zerodisparityReliable(k,l)=0;EdReliable(k,l)=0;Ne(k,l)=1; % indicates no-estimated stateendendend% calculating reliablities both raw disparity and filtered disparityTopE=0;TopER=0;Sd=0;for k=1:m-1for l=1:nx-1TopE=TopE+Ed(k,l);if Ne(k,l)==0TopER=TopER+EdReliable(k,l);Sd=Sd+1;endendendReliablityE=((nx-1)*(m-1))/(TopE);ReliablityER=(Sd)/(TopER);% median filtering for repairment of occulations%disparityF=IterativeAveragingFilter(disparity,5,[4 4]);disparityF=medfilt2(disparityReliable,[5 5]);for k=1:m-1for l=1:nx-1% Zero disparity produce zero deptif disparityF(k,l)<5;DepthMap(k,l)=0;elseDepthMap(k,l)=foc*(T/disparityF(k,l));endendendfprintf ('******** Reliablity Report ********** \n')fprintf ('Reliablity of the disparity map: %f \n',ReliablityE)fprintf ('Reliablity of the disparity map filtered: %f \n',ReliablityER)fprintf ('******** Algoritm Speed Report ********** \n')fprintf ('Time Spend for calculation: %f \n',toc)figure(1)imagesc(disparityx);colorbar;colormap('gray')title('Disparity Map')figure(2)colormap('gray')imagesc(disparityReliable);colorbar;title('Disparity Map with Reliable Disparities')figure(3)colormap('gray')imagesc(disparityF);colorbar;title('Median Filtered Disparity Map with Reliable Disparities')figure(4)colormap('gray')imagesc(DepthMap);colorbar;title('Depth Map from Disparity Map with Reliable Disparities [cm]')figure(5)colormap('gray')imagesc(log10(Ed));colorbar;title('Dispatiy Map Error Energy')figure(6)imagesc(XR./255)title('Right Camera Color Image')figure(7)imagesc(XL./255)title('Left Camera Color Image')figure(8)colormap('bone')mesh(disparityF)title('3D View')figure(9)subplot(2,1,1); imagesc(disparityx);colorbar;colormap('gray')title('Disparity Map')subplot(2,1,2);imagesc(XR(:,1:n-dmax)./255);colorbar;title('Image Zone for Disparity Calculated')
⛳️ 运行结果

🔗 参考文献
http://arxiv.org/ftp/arxiv/papers/0812/0812.1340.pdf
Alagoz, B. B. (2008). Obtaining depth maps from color images by region based stereo matching algorithms. arXiv preprint arXiv:0812.1340.


















 1573
1573

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











