







 本文探讨无人机编队飞行中,采用纯方位无源定位技术进行位置调整的问题。针对10架无人机的圆形编队,讨论了在不同信号发射条件下,如何实现无人机的有效定位,并提出了位置调整方案。此外,还分析了在锥形编队队形下纯方位无源定位的应用。
本文探讨无人机编队飞行中,采用纯方位无源定位技术进行位置调整的问题。针对10架无人机的圆形编队,讨论了在不同信号发射条件下,如何实现无人机的有效定位,并提出了位置调整方案。此外,还分析了在锥形编队队形下纯方位无源定位的应用。
1 B题:无人机遂行编队飞行中的纯方位无源定位
无人机集群在遂行编队飞行时,为避免外界干扰,应尽可能保持电磁静默,少向外发射电
磁波信号。为保持编队队形,拟采用纯方位无源定位的方法调整无人机的位置,即由编队中某
几架无人机发射信号、其余无人机被动接收信号,从中提取出方向信息进行定位,来调整无人
机的位置。编队中每架无人机均有固定编号,且在编队中与其他无人机的相对位置关系保持不
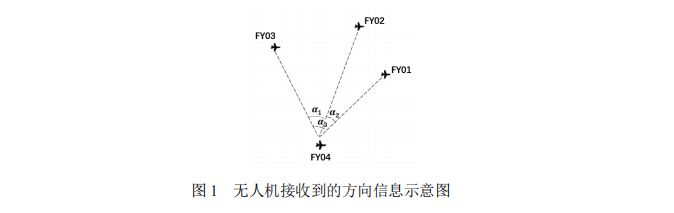
变。接收信号的无人机所接收到的方向信息约定为:该无人机与任意两架发射信号无人机连线
之间的夹角(如图 1 所示)。例如:编号为 FY01、FY02 及 FY03 的无人机发射信号,编号为
FY04 的无人机接收到的方向信息是 𝛼1,𝛼2 和 𝛼3。
请建立数学模型,解决以下问题:
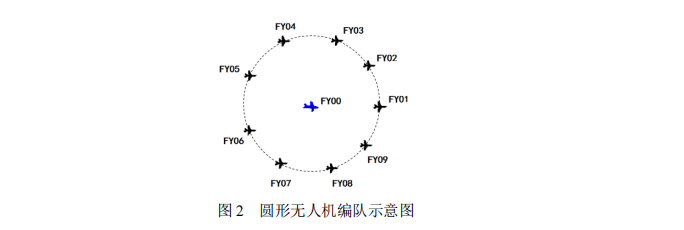
问题 1 编队由 10 架无人机组成,形成圆形编队,其中 9 架无人机(编号 FY01~FY09)均
匀分布在某一圆周上,另 1 架无人机(编号 FY00)位于圆心(见图 2)。无人机基于自身感知
的高度信息,均保持在同一个高度上飞行。
(1) 位于圆心的无人机(FY00)和编队中另 2 架无人机发射信号,其余位置略

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











