



拖拽式构建智能体的框架
1 简介
拖拽式构建智能体的开源框架比较多,例如:偏向工作流:coze、sim、n8n等;偏向RAG的有:Dify、RagFlow、MaxKB等;支持使用国产coze,学习成本低,相对好用和成熟。
sim智能体框架,Sim是一款AI应用的可视化工作流构建工具,支持通过拖拽方块即可构建AI代理工作流。通过在画布上连接模块,即可创建强大AI代理、自动化流程及数据处理管道——无需编写代码。
使用github上的docker-compose搭建,没有安装成功。一直报下面的错({“message”:“Request timed out”,“stack”:“Error: Request timed out\n at (file:///app/apps/sim/.next/server/chunks/node_modules_@opentelemetry_5e131325._.js:1:3170)\n at emit (node:events:92:22)\n at emitCloseNTAndComplete (internal:http:82:58)\n at processTicksAndRejections (native)”,“name”:“Error”})
# 官网文档
https://docs.sim.ai/introduction
# Github地址
https://github.com/simstudioai/sim
Coze Studio智能体框架,Coze Studio是一站式 AI Agent 开发工具。提供各类最新大模型和工具、多种开发模式和框架,从开发到部署,为你提供最便捷的 AI Agent 开发环境,比较有优势。
# Github地址
https://github.com/coze-dev/coze-studio
n8n是一个工作流自动化平台,为技术团队提供代码灵活性与无代码速度的双重优势。
# Github地址
https://github.com/n8n-io/n8n
# 官网地址
https://docs.n8n.io/
2 Coze搭建智能体
2.1 仓库信息
# 下载github仓库(版本:v0.3.0)
https://github.com/coze-dev/coze-studio/tree/v0.3.0
2.2 安装镜像
# 进入目录
cd coze-studio-0.3.0
# 1 设置模型
# 如果不默认设置,无法“创建智能体”,会提示“there is no llm model in use, please config a model first”
cp backend/conf/model/template/model_template_ark_doubao-seed-1.6.yaml backend/conf/model/ark_doubao-seed-1.6.yaml
# 需要先到 "火山方舟上获取api_key和model",参考地址:https://www.volcengine.com/docs/82379/1541594
# 设置id、meta.conn_config.api_key、meta.conn_config.model
# id在第1行,可以不用修改;
# meta.conn_config.api_key 在110行
# meta.conn_config.model 在112行
# 编辑文件
vim backend/conf/model/ark_doubao-seed-1.6.yaml
# 2 修改配置环境
# 进入docker
cd docker
# 复制环境
cp .env.example .env
# 修改“.env”中的地址
# 第9行,修改为“0.0.0.0:8888”,可以放开仅仅本机访问
export WEB_LISTEN_ADDR="0.0.0.0:8888"
# docker compose启动服务
docker compose -f docker-compose.yml up -d
启动成功
2.3 简单使用
(1)登录

(2)创建智能体



(3)创建应用


3 sim搭建智能体
3.1 安装Ollama
使用docker安装ollama
docker run -itd \
--name ollama \
-v /home/ollama:/root/.ollama \
-p 11434:11434 \
ollama/ollama
3.2 仓库信息
⚠️ 注意:Docker必须与访问的地址在同一台机器上。
# 下载Github地址(版本:v0.4.15)
https://github.com/simstudioai/sim/tree/v0.4.15
# 进入仓库目录
cd sim-0.4.15
在Linux系统终端中生成密钥(可以不用修改)
# 生成32位密钥
openssl rand -hex 32
# 我的生成了
68d80de4fcbf4ae28fa443e485be03c6811ac6822750a915dd60c011f08d6669
修改docker-compose.prod.yml配置信息(可以不用修改)
# 1 注意:localhost不要修改,系统设置了跨域
# 2 添加密钥,注意前面的“-”不要删除
将“your_auth_secret_here”修改为:68d80de4fcbf4ae28fa443e485be03c6811ac6822750a915dd60c011f08d6669
将"your_encryption_key_here"修改为:68d80de4fcbf4ae28fa443e485be03c6811ac6822750a915dd60c011f08d6669
启动服务
docker compose -f docker-compose.prod.yml up -d
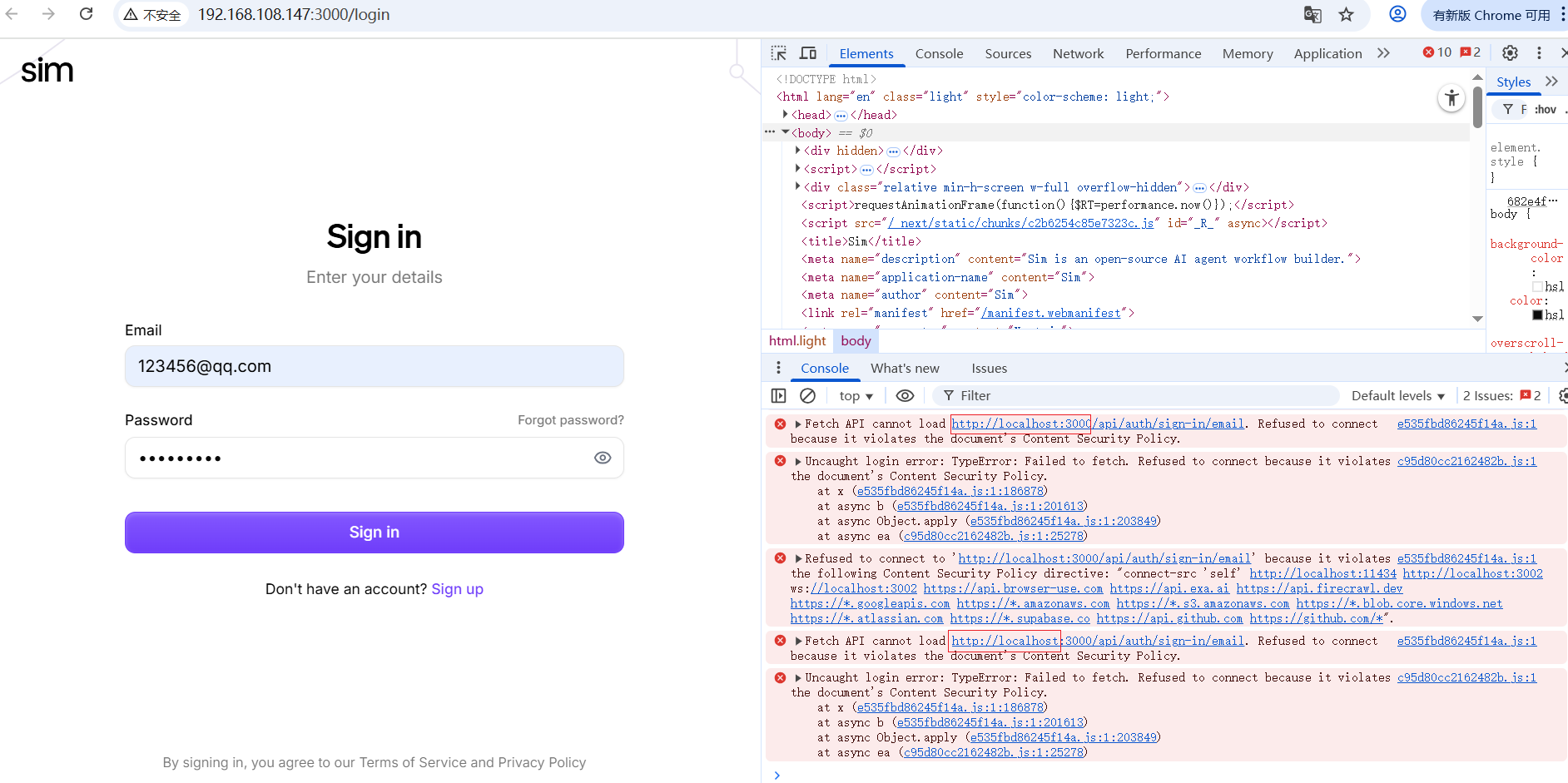
访问地址(使用使用其他地址访问能看到页面,无法完成注册和登录等)
http://localhost:3000/
下文可以看到页面可以访问,但是接口是访问不通,我试着将“localhost"修为宿主机的IP地址(192.168.108.147),虽然能注册和登录成功,但是登录进入后仍然显示跨域错误。
4 n8n搭建智能体
4.1 设置共享目录
# 设置目录
makedir /home/n8n_data
# 设置权限
chmod +777 /home/n8n_data
4.2 创建容器
# 创建容器
docker run -itd --rm \
--name n8n \
-p 5678:5678 \
-e N8N_SECURE_COOKIE=false \
-v /home/n8n_data:/home/node/.n8n \
n8nio/n8n
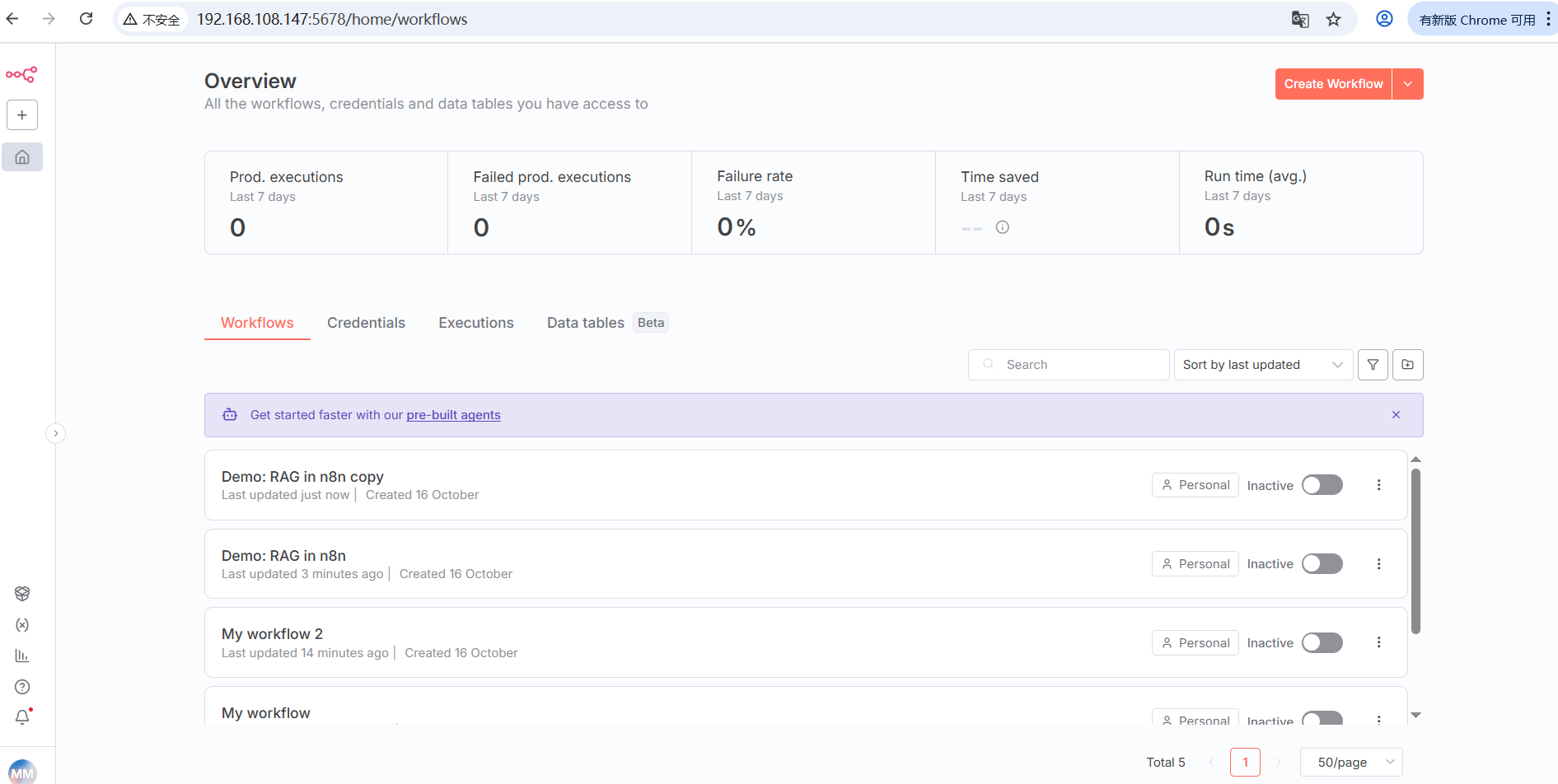
访问地址(不好的地方,全是英文学习成本比较高)
http://192.168.108.147:5678/home

















 2009
2009

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









