




 本文对OpenPose - tensorflow代码的数据读取部分进行解析。实现了图片数据增强,如色彩增强、随机翻转等;将关键点转化为热量图,包括关键点和亲和域的热量图;使用多进程将数据放入队列以减少训练时间。最后还介绍了数据读取脚本的测试方法。
本文对OpenPose - tensorflow代码的数据读取部分进行解析。实现了图片数据增强,如色彩增强、随机翻转等;将关键点转化为热量图,包括关键点和亲和域的热量图;使用多进程将数据放入队列以减少训练时间。最后还介绍了数据读取脚本的测试方法。
前言
该openpose-tensorflow的工程是自己实现的,所以有些地方写的会比较简单,但阅读性强、方便使用。
论文翻译 || openpose – Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields
工程实现 || 基于opencv使用openpose完成人体姿态估计
OpenPose -tensorflow代码解析(1)——工程概述&&训练前的准备
OpenPose -tensorflow代码解析(2)—— 数据增强和处理 dataset.py
OpenPose -tensorflow代码解析(3)—— 网络结构的搭建 Net.py
OpenPose -tensorflow代码解析(4)—— 训练脚本 train.py
OpenPose -tensorflow代码解析(5)—— 预测代码解析 predict.py
1 代码概述
将openpose的数据读取定义称一个类
class dataset
里面主要实现了3个功能:
- 图片的数据增强:随机翻转、随机裁剪、旋转平移、色彩的增强
- 将关键点转化成 openpose的网络的输出形式:关键点的热量图、亲和域的热量图
- 将增强好的image、转化好的label 使用多进程放进队列中。
这是让cpu提前处理数据放入队列中,当训练时,GPU完成一次反向传播后,能够直接获取到新的数据进行新一次的迭代,避免GPU处于空闲,减少总共训练时间
2 初始化
初始化部分,就是读取配置文件(配置脚本
opt.py附在最后),已经设定一些遍变量。其中需要说明的是:
- self.point_num = cfg.OP.cpm_num 设置的是关键点的数量,不包含背景
- self.paf_num = cfg.OP.paf_num 设置的是关键点之间的连接数量*2
- self.shuffle_ref 设置的是关键点的具体连接方式
- self.LR_morrir 如果关键点是对称的,对于关键点[0,1,2,3,4,5],假设它们对应的镜像点的索引为 [5,4,3,2,1,0]。如果关键点不是对称的,这里为空
- self.Q_name = Queue(self.num_samples) 读取验证数据的名字的队列
- self.Q_data = Queue(1000) 读取训练数据的队列
这里的队列长度的设置是有讲究的。因为Dataset会被实例化成 【trainset、testset】,所以一定要保证当单个队列 Q_data 满数据时,不能占满整个内存,大约50%即可,否则可能发生另外一个队列无法放置数据
class Dataset: def __init__(self, dataset_type): self.fortest = False self.annot_path = cfg.TRAIN.annot_path if dataset_type == 'train' else cfg.TEST.annot_path if not os.path.exists(self.annot_path): print(self.annot_path+" 文件不存在!") exit() self.input_sizes = cfg.TRAIN.input_size if dataset_type == 'train' else cfg.TEST.input_size self.batch_size = cfg.TRAIN.batch_size if dataset_type == 'train' else cfg.TEST.batch_size self.data_aug = cfg.TRAIN.data_aug if dataset_type == 'train' else cfg.TEST.data_aug self.WH_ratio = cfg.OP.WH_ratio self.stride = cfg.OP.strides self.point_num = cfg.OP.cpm_num self.paf_num = cfg.OP.paf_num self.shuffle_ref = [[0, 1], [1, 2], [2, 3], [3, 4], [0, 5], [5, 6], [6, 7], [7, 8], [0, 9], [9, 10], [10, 11], [11, 12], [0, 13], [13, 14], [14, 15], [15, 16], [0, 17], [17, 18], [18, 19], [19, 20], [0, 21]] self.LR_morrir = [] self.sigma = 0.8 self.annotations = self.load_annotations() self.num_samples = len(self.annotations) # 样本的数量 self.num_step_one_epoch = int(np.ceil(self.num_samples / self.batch_size)) # 一轮读取批数 self.batch_count = 0 self.num_trianepoch = cfg.TRAIN.first_stage_epoch + cfg.TRAIN.second_stage_epoch self.Q_name = Queue(self.num_samples) # 读取验证数据的名字的队列 self.Q_data = Queue(1000) # 读取训练数据的队列
然后
- 定义 len(dataset) = num_step_one_epoch,也就是一轮训练的步数
- 加载 train.txt 或者 test.txt 文件,获取到数据集的 image-label 的路径
- 根据batch 的大小,设定好一批数据的numpy 数组。
其中值得注意的是,self.input_size的计算。当我们想要设置多尺度图片进行训练,只需要在opt.py 文件中,设置多个尺寸,这里就会每个batch的数据,随机获取一个尺寸的大小进行处理数据。所以Prepare()函数,是要在每个batch都进行调用,就不能放在__init__()中。def __len__(self): return self.num_step_one_epoch def load_annotations(self,): with open(self.annot_path, 'r') as f: txt = f.readlines() annotations = [line.split() for line in txt ] return annotations def Prepare(self): size = random.choice(self.input_sizes) self.input_size = [size, int(size//self.WH_ratio)] self.output_size = [int(self.input_size[0]//self.stride), int(self.input_size[1]//self.stride)] self.batch_image = np.zeros((self.batch_size, self.input_size[0], self.input_size[1], 3), dtype=float) self.batch_label_heatmap = np.zeros(( self.batch_size, self.output_size[0], self.output_size[1], self.point_num+1), dtype=float) self.batch_label_vectmap = np.zeros(( self.batch_size, self.output_size[0], self.output_size[1], len(self.shuffle_ref)*2), dtype=float)
2 数据增强
数据增强:色彩增强、随机翻转、随机旋转、随机平移
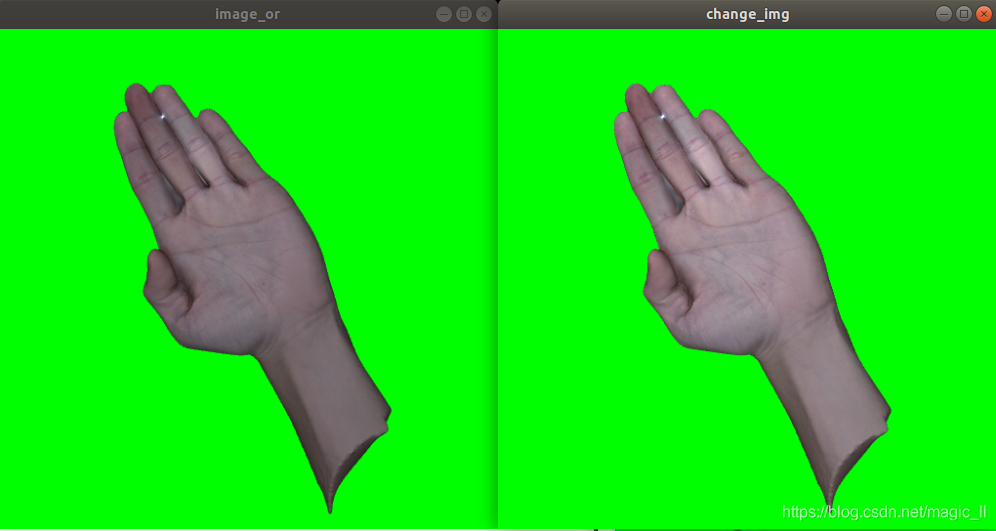
数据处理:给图片填充和缩放,图片的内容保持原本的长宽比例def load_data(self, image_path, label_path): if not os.path.exists(image_path): print(image_path+" 图片不存在") raise KeyError("%s does not exist ... " %image_path) image = np.array(cv2.imread(image_path)) joint = np.loadtxt(label_path) show_image("image_or", image) if self.fortest else None if self.data_aug: image = self.change_img(image) show_image("change_img", image) if self.fortest else None image,joint = self.random_horizontal_flip(image, joint) show_image("random_horizontal_flip", image) if self.fortest else None image,joint = self.random_horizontal_rotation(image, joint) show_image("random_horizontal_rotation", image) if self.fortest else None image, joint = self.random_translate(image, joint) show_image("random_horizontal_flip", image) if self.fortest else None image, joint = image_preporcess(image, self.input_size, joint) show_image("random_horizontal_flip", image) if self.fortest else None return image, jointdef show_image(name, image): cv2.namedWindow(name, 0) # 0 窗口可伸缩 cv2.resizeWindow(name, 500, 500) # 初始窗口大小 cv2.imshow(name, image) # 展示图片 cv2.waitKey(0) # 保持展示 # cv2.destroyAllWindows() # 注销窗口2.1 色彩增强
色彩的改变,在 Pillow 库中,有很方便的api
def change_img(self,img): p = random.randint(0, 3) a1 = random.uniform(0.8, 2) a2 = random.uniform(0.8, 1.4) a3 = random.uniform(0.8, 1.7) a4 = random.uniform(0.8, 2.5) img = Image.fromarray(img) img = ImageEnhance.Color(img).enhance(a1) if p == 0 else img img = ImageEnhance.Brightness(img).enhance(a2) if p == 1 else img img = ImageEnhance.Contrast(img).enhance(a3) if p == 2 else img img = ImageEnhance.Sharpness(img).enhance(a4) if p == 3 else img img = np.array(img) return img
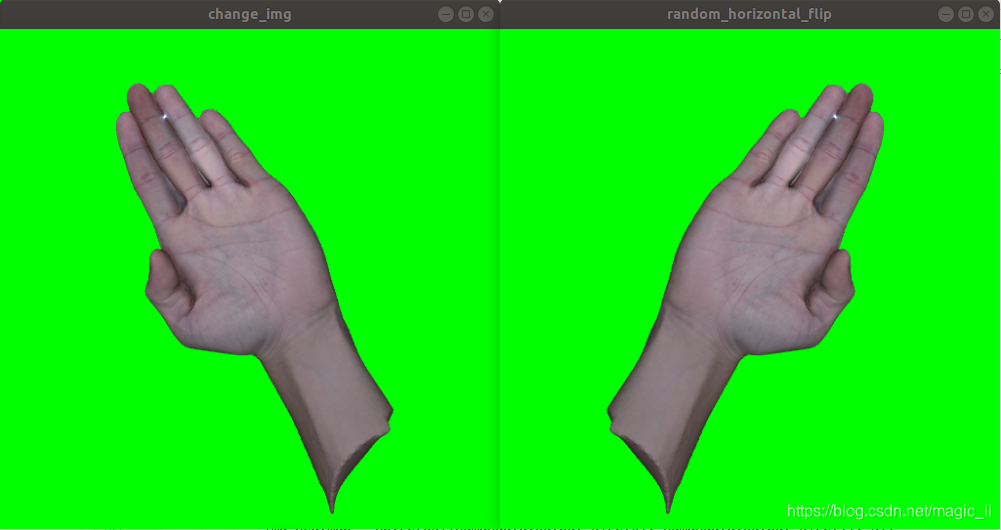
2.2 随机水平翻转
如果标注的关节点是镜像的,如人体的关节点,在做水平翻转时,主要关键点的位置和索引,都要进行镜像处理,也就是
joint = joint[self.LR_morrir,:]def random_horizontal_flip(self, image, joint): if random.random() < 0.5: _, w, _ = image.shape image = image[:, ::-1, :] joint[:, 0] = w - joint[:, 0] # joint = joint[self.LR_morrir,:] return image, joint
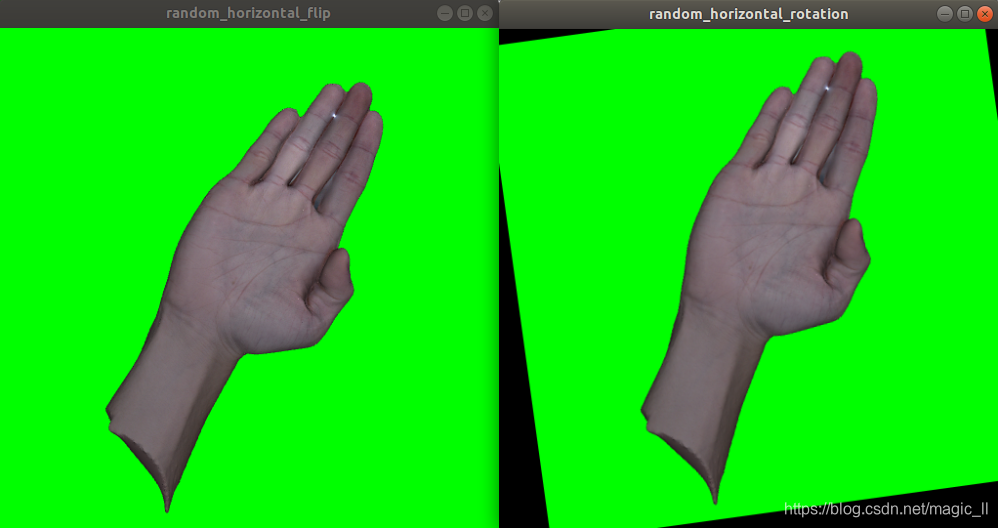
2.3 随机旋转
思路:
根据随机获取的角度值,得到相应的旋转矩阵;
用这个旋转矩阵,以及opencv中的api,对图片进行旋转;
用这个旋转矩阵,对关键点进行相应的旋转。def random_horizontal_rotation(self, image, joint): if random.random() < 0.7: # 设置旋转矩阵 transform_matrix = affine_rotation_matrix(angle=(-10,10), x=self.input_size[1]//2, y=self.input_size[0]//2) # 使用旋转矩阵旋转图片 image = affine_transform_cv2(image, transform_matrix) # 使用旋转矩阵旋转关键点 joint = affine_transform_keypoints(joint, transform_matrix) return image, joint# 设置旋转矩阵 def affine_rotation_matrix(angle, x, y): if isinstance(angle, tuple): theta = np.pi / 180 * np.random.uniform(angle[0], angle[1]) else: theta = np.pi / 180 * angle rotation_matrix = np.array([[np.cos(theta), np.sin(theta), 0], [-np.sin(theta), np.cos(theta), 0], [0, 0, 1]]) o_x = (x - 1) / 2.0 o_y = (y - 1) / 2.0 offset_matrix = np.array([[1, 0, o_x], [0, 1, o_y], [0, 0, 1]]) reset_matrix = np.array([[1, 0, -o_x], [0, 1, -o_y], [0, 0, 1]]) transform_matrix = np.dot(np.dot(offset_matrix, rotation_matrix), reset_matrix) return transform_matrix # 使用旋转矩阵旋转图片 def affine_transform_cv2(x, transform_matrix, flags=None, border_mode='constant'): rows, cols = x.shape[0], x.shape[1] if flags is None: flags = cv2.INTER_AREA if border_mode is 'constant': border_mode = cv2.BORDER_CONSTANT elif border_mode is 'replicate': border_mode = cv2.BORDER_REPLICATE else: raise Exception("unsupport border_mode, check cv.BORDER_ for more details.") return cv2.warpAffine(x, transform_matrix[0:2, :], (cols, rows), flags=flags, borderMode=border_mode) # 使用旋转矩阵旋转关键点 def affine_transform_keypoints(coords_list, transform_matrix): coords = coords_list.transpose([1, 0]) coords = np.insert(coords, 2, 1, axis=0) coords_result = np.matmul(transform_matrix, coords) coords_result = coords_result[0:2, :].transpose([1, 0]) return coords_result
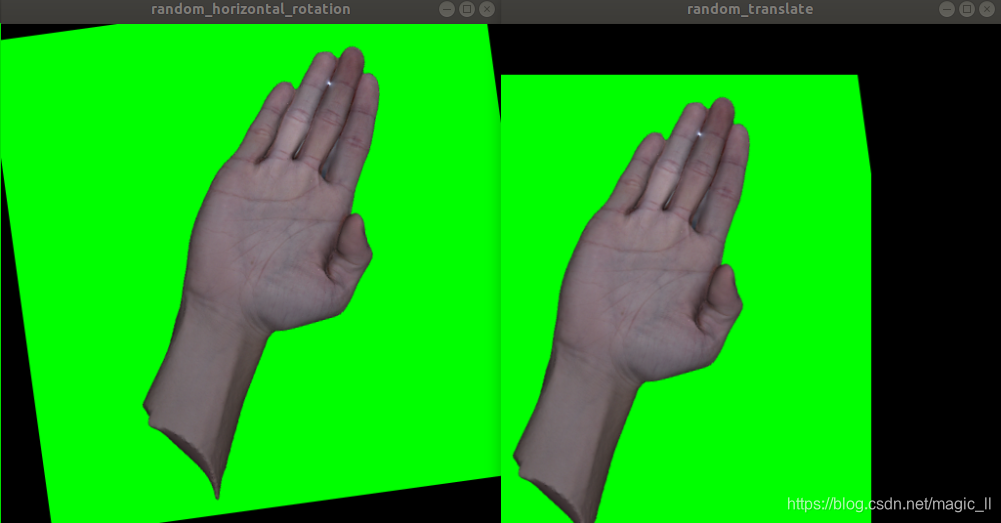
2.4 随机平移
进行随机平移的操作,一定要保证不能将标签所在区域 平移超出图片的范围。
所以需要先计算关键点的最小凸集,然后用这个参数,来设定平移的范围。def random_translate(self, image, joint): if random.random() < 0.5: h, w, _ = image.shape # 求图片中所有点的最小凸集框的左上角和右下角 max_bbox = np.concatenate([np.min(joint, axis=0), np.max(joint, axis=0)], axis=-1) # 获取最小凸集与图片的最上角的距离 max_l_trans = max_bbox[0] max_u_trans = max_bbox[1] max_r_trans = w - max_bbox[2] max_d_trans = h - max_bbox[3] tx = random.uniform(-(max_l_trans - 1), (max_r_trans - 1)) ty = random.uniform(-(max_u_trans - 1), (max_d_trans - 1)) M = np.array([[1, 0, tx], [0, 1, ty]]) image = cv2.warpAffine(image, M, (w, h)) joint = joint + np.array([tx,ty]) return image, joint
2.5 数据尺寸处理
我们需要将图片处理成 神经网络输入的尺寸。
原则是,填充短边 使长宽比例与神经网络输入长款比例一样,然后再进行缩放,保证图片没有被拉伸或压缩。具体实现的方式很多种,只要实现没有改变长款比例就行。def image_preporcess(image, target_size, joint=None): # image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB).astype(np.float32) ih, iw = target_size h, w, _ = image.shape scale = min(iw/w, ih/h) nw, nh = int(scale * w), int(scale * h) image_resized = cv2.resize(image, (nw, nh)) image_paded = np.full(shape=[ih, iw, 3], fill_value=128, dtype=np.uint8) dw, dh = (iw - nw) // 2, (ih-nh) // 2 image_paded[dh:nh+dh, dw:nw+dw, :] = image_resized # image_paded = image_paded / 255. if joint is None: return image_paded else: joint = joint * scale + + np.array([dw,dh]) return image_paded, joint
3 关键点转化成热量图
3.1 生成关键点的热量图 heatmap
- 生成热量图的数量为 num_keypoint + 1(背景类)。
- 对于每一个索引的关键点,都生成一张热量图。关键点的坐标在热量图中相应的位置,会生成一个二元正态分布的数据。该函数实现的方式比较多
- 背景类的热量图的数值,存在关键点的位置的像素值为0,其他为1。
def get_heatmap(self, joint_list,sign=True): # 该函数当中的joint_list,需要的是关节点的坐标,与图片像素的索引的围度数据相反 heatmap = np.zeros((self.point_num+1, self.output_size[0], self.output_size[1]), dtype=np.float32) for idx in range(self.point_num): joints = joint_list[idx] if joints[0] < 0 or joints[1] < 0: continue # print("==") self.put_heatmap(heatmap, idx, joints, self.sigma) heatmap = heatmap.transpose((1, 2, 0)) heatmap[:, :, -1] = np.clip(1 - np.amax(heatmap, axis=2), 0.0, 1.0) # background return heatmap def put_heatmap(self, heatmap, plane_idx, center, sigma): center_x, center_y = center _, height, width = heatmap.shape[:3] th = 4.6052 delta = math.sqrt(th * 2) x0 = int(max(0, center_x - delta * sigma)) y0 = int(max(0, center_y - delta * sigma)) x1 = int(min(width, center_x + delta * sigma)) y1 = int(min(height, center_y + delta * sigma)) for y in range(y0, y1): for x in range(x0, x1): d = (x - center_x) ** 2 + (y - center_y) ** 2 exp = d / 2.0 / sigma / sigma if exp > th: continue heatmap[plane_idx][y][x] = max(heatmap[plane_idx][y][x], math.exp(-exp)) heatmap[plane_idx][y][x] = min(heatmap[plane_idx][y][x], 1.0) return heatmap我们知道 一维的正太分布的公式为 f ( x ) = 1 2 π σ e x p − ( x − μ ) 2 2 ∗ σ f(x)=\frac{1}{\sqrt{2 \pi }\sigma}exp^{-\frac{(x-\mu)^2}{2*\sigma}} f(x)=2πσ1exp−2∗σ(x−μ)2
下面的图为二元正太分布示意图

3.2 生成亲和域的热量图 vectmap
- 有连接关系的关键点对 n 组,会生成亲和域的热量图 n*2 组。
- 在关键点对的连线上,一定宽度的像素值,都进行赋值。一张热量图中赋值为点对的方向向量的x分量,一张赋值为方向向量的 y 分量。
- 多对连接点对 如果存在交叉重叠,那么重叠的位置的像素值,为多对连接点对的分量的平均值。
def get_vectormap(self, joint_list,sign = True): # 该函数当中的joint_list,需要的是关节点的坐标,与图片像素的索引的围度数据相反 vectormap = np.zeros((len(self.shuffle_ref)*2, self.output_size[0], self.output_size[1]), dtype=np.float32) countmap = np.zeros((len(self.shuffle_ref), self.output_size[0], self.output_size[1]), dtype=np.int16) for plane_idx, (j_idx1, j_idx2) in enumerate(self.shuffle_ref): center_from = joint_list[j_idx1] center_to = joint_list[j_idx2] # print("ceter from: ", center_from) # print("ceter to: ", center_to) if center_from[0] < -100 or center_from[1] < -100 or center_to[0] < -100 or center_to[1] < -100: continue self.put_vectormap(vectormap, countmap, plane_idx, center_from, center_to) vectormap = vectormap.transpose((1, 2, 0)) nonzeros = np.nonzero(countmap) for p, y, x in zip(nonzeros[0], nonzeros[1], nonzeros[2]): if countmap[p][y][x] <= 0: continue vectormap[y][x][p * 2 + 0] /= countmap[p][y][x] vectormap[y][x][p * 2 + 1] /= countmap[p][y][x] return vectormap.astype(np.float16) def put_vectormap(self, vectormap, countmap, plane_idx, center_from, center_to, threshold=1): _, height, width = vectormap.shape[:3] vec_x = center_to[0] - center_from[0] vec_y = center_to[1] - center_from[1] min_x = max(0, int(min(center_from[0], center_to[0]) - threshold)) min_y = max(0, int(min(center_from[1], center_to[1]) - threshold)) max_x = min(width, int(max(center_from[0], center_to[0]) + threshold)) max_y = min(height, int(max(center_from[1], center_to[1]) + threshold)) norm = math.sqrt(vec_x ** 2 + vec_y ** 2) if norm == 0: return vec_x /= norm vec_y /= norm for y in range(min_y, max_y): for x in range(min_x, max_x): bec_x = x - center_from[0] bec_y = y - center_from[1] dist = abs(bec_x * vec_y - bec_y * vec_x) if dist > threshold: continue countmap[plane_idx][y][x] += 1 vectormap[plane_idx * 2 + 0][y][x] = vec_x vectormap[plane_idx * 2 + 1][y][x] = vec_y
4 将data 多进程放入队列
- 设置操作1:获取处理后的input、label,组成一个batch,将batch 数据放入到 Q_data 的队列中
- 设置操作2:获取所有数据路径,打乱后放入 Q_name队列中
- 设置多进程:多进程进行 操作1/2,
def readdata(self, image_path, label_path, num): image, joint = self.load_data(image_path, label_path) image = image.astype(np.float32) image = (image - np.mean(image, axis=(0,1)))/(np.std(image, axis=(0, 1))+1e-8) self.batch_image[num,:,:,:] = image self.batch_label_heatmap[num,:,:,:] = self.get_heatmap(joint / self.stride) self.batch_label_vectmap[num] = self.get_vectormap(joint / self.stride) return image, joint def Q_getname(self): for i in range(self.num_trianepoch): if self.data_aug: random.shuffle(self.annotations) for j in range(self.num_samples): if not os.path.exists(self.annotations[j][0]) or not os.path.exists(self.annotations[j][1]): continue self.Q_name.put(self.annotations[j]) def Q_getData(self, thread): self.Prepare() name = [] while 1: if self.batch_count < self.num_step_one_epoch: # 当【读取了几批】小于【一轮总批数】 num = 0 # 统计批内读取个数 while num < self.batch_size: #【批内读取数据个数】小于【一个batch数值】 namefile = self.Q_name.get() self.readdata(namefile[0], namefile[1], num) name.append(namefile[0]) num += 1 self.batch_count += 1 # 统计一轮的训练,读取了几个批次 # print(name) # print(thread ) self.Q_data.put([name, thread, self.batch_image, self.batch_label_heatmap, self.batch_label_vectmap]) name = [] else: self.batch_count = 0 def start(self, P1): Process(target=self.Q_getname, args=()).start() for thread in range(P1): Process(target=self.Q_getData, args=(thread,)).start() return self.Q_data
5 全面测试数据读取是否正确
当我们编写好了数据读取的脚本,需要进行两方面的测试:
- case1:单张图:输入图片的数据增强;神经网络输出相应的label的制作
- case2:多进程的数据读取是否正确:避免出现多进程重复读取等情况
if __name__ == '__main__': case = 1 # 1:测试单张图片的数据增强 2:测试队列的获取图片的重复性的问题 if case: humandata = Dataset("dotest") humandata.data_aug = True # 是否进行数据增强 humandata.fortest = False # 是否显示过程中每种增强后的图片 humandata.Prepare() for s in range(len(humandata.annotations)): # r[s] = "590DSC_0165.png" image_path = humandata.annotations[s][0] label_path = humandata.annotations[s][1] print(image_path) print(label_path) image, joint = humandata.readdata(image_path, label_path ,0) print(joint.shape) c1 = [] for ii in range(len(joint)): c1.append((int(joint[ii][0]), int(joint[ii][1]))) for cc in range(len(joint)): cv2.circle(image, c1[cc], 2, (255, 0, 0), thickness=1) show_image("random_horizontal_flip", image) img_heatmap = np.zeros((humandata.output_size[0], humandata.output_size[1], 3)) for i in range(humandata.batch_label_heatmap.shape[3]-1): H =humandata.batch_label_heatmap[0,:,:,i] H = np.array([H,H,H]).transpose([1,2,0]) img_heatmap = img_heatmap + H # img_test1 = cv2.resize(H, (humandata.input_size[1], humandata.input_size[0])) # img_heatmap1 = cv2.resize(img_heatmap, (humandata.output_size[1], humandata.output_size[0])) # cv2.namedWindow('demo5', 0) # 0 窗口可伸缩 # cv2.resizeWindow('demo5', 500, 500) # 初始窗口大小 # cv2.imshow("demo5", H) # 展示图片 # cv2.waitKey(0) # 保持展示 cv2.namedWindow('demo5', 0) # 0 窗口可伸缩 cv2.resizeWindow('demo5', 500, 500) # 初始窗口大小 cv2.imshow("demo5", img_heatmap) # 展示图片 cv2.waitKey(0) # 保持展示 img_heatmap = np.zeros((humandata.output_size[0], humandata.output_size[1], 3)) for i in range(humandata.batch_label_vectmap.shape[3]-1): H = abs(humandata.batch_label_vectmap[0,:,:,i] * 255) H = np.array([H,H,H]).transpose([1,2,0]) img_heatmap = img_heatmap + H # img_test1 = cv2.resize(H, (humandata.input_size[1], humandata.input_size[0])) # img_heatmap1 = cv2.resize(img_heatmap, (humandata.input_size[1], humandata.input_size[0])) # cv2.namedWindow('demo5', 0) # 0 窗口可伸缩 # cv2.resizeWindow('demo5', 500, 500) # 初始窗口大小 # cv2.imshow("demo5", H) # 展示图片 # cv2.waitKey(0) # 保持展示 cv2.namedWindow('demo5', 0) # 0 窗口可伸缩 cv2.resizeWindow('demo5', 500, 500) # 初始窗口大小 cv2.imshow("demo5", img_heatmap) # 展示图片 cv2.waitKey(0) # 保持展示 else: humandata = Dataset("train") Q_traindata = humandata.start(3) for i in range(10): A = Q_traindata.get() print(A[1],A[0]) # 打印出队列存储的名字,以及来源的进程 id

6 附
opt.py脚本from easydict import EasyDict as edict print("read config ====================================") cfg = edict() cfg.OP = edict() # Set the class name cfg.OP.strides = 8 cfg.OP.WH_ratio = 1 cfg.OP.cpm_num = 22 cfg.OP.paf_num = 21*2 # Train options cfg.TRAIN = edict() cfg.TRAIN.annot_path = "../data/train.txt" cfg.TRAIN.batch_size = 8 cfg.TRAIN.input_size = [512] # cfg.TRAIN.INPUT_SIZE = [320, 352, 384, 416, 448, 480, 512, 544, 576, 608] cfg.TRAIN.data_aug = True cfg.TRAIN.learn_rate_init = 1e-4 cfg.TRAIN.learn_rate_end = 1e-6 cfg.TRAIN.warmup_epoch = 2 cfg.TRAIN.first_stage_epoch = 100 cfg.TRAIN.second_stage_epoch = 30 cfg.TRAIN.initial_weights = None cfg.TRAIN.ckpt_path = "./model/checkpoint0/" cfg.TRAIN.log_path = './model/log0/' # # TEST options cfg.TEST = edict() cfg.TEST.annot_path = "../data/test.txt" cfg.TEST.batch_size = 8 cfg.TEST.input_size = [512] cfg.TEST.data_aug = False


















 5万+
5万+




 到【灌水乐园】发言
到【灌水乐园】发言







