




M创动工坊提供mcdgf.taobao.com
- 硬件准备

STM32核心板,MT6701磁编码器带线(M创动工坊提供),ST-link,USB线等
- 软件准备
- 安装微软的Vscode,网上很多教程,且有说明书

安装好stlink驱动

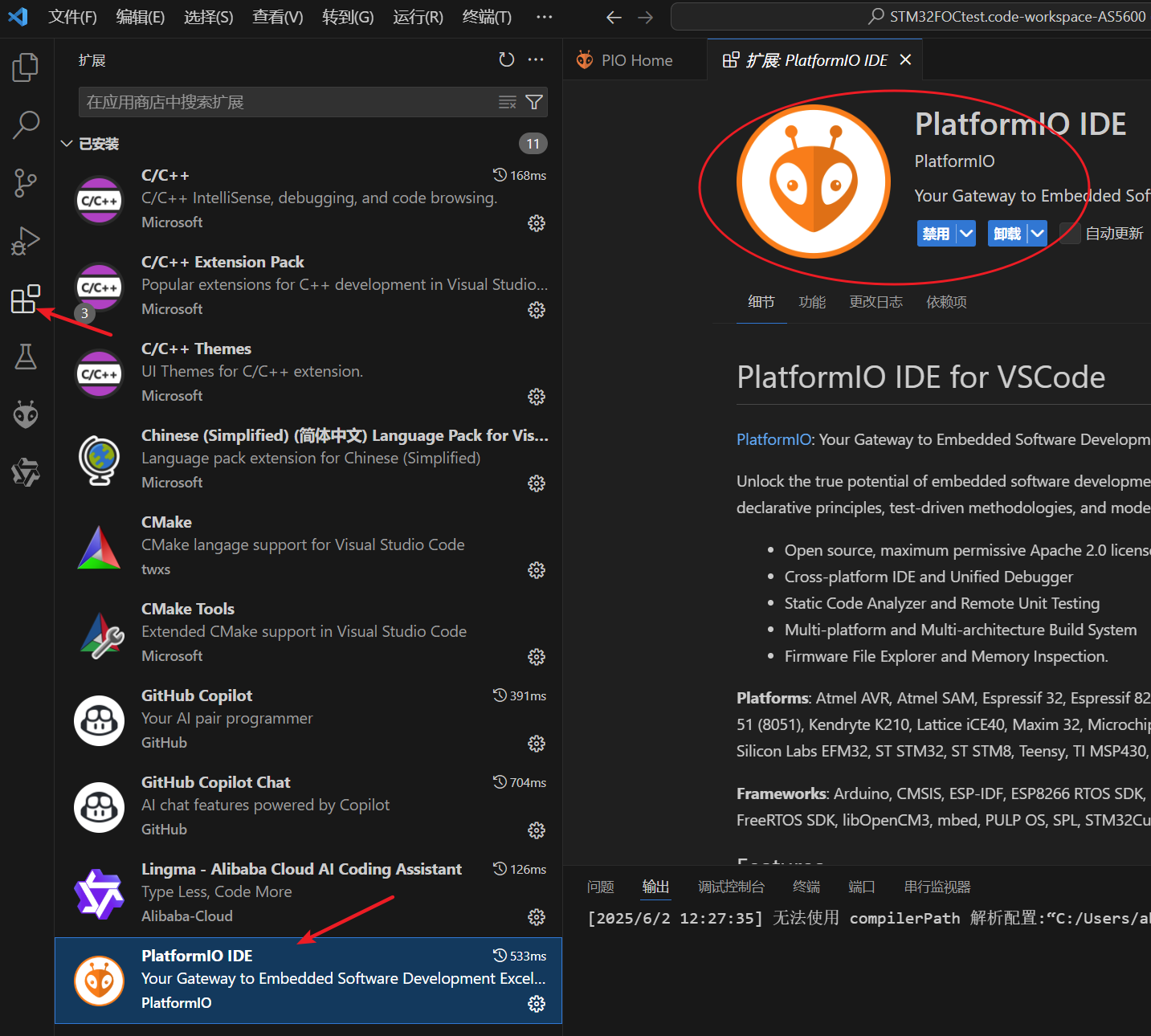
- 打开vscode并安装PlatformIO插件。其他的一些中文插件、AI插件等等,根据需要安装
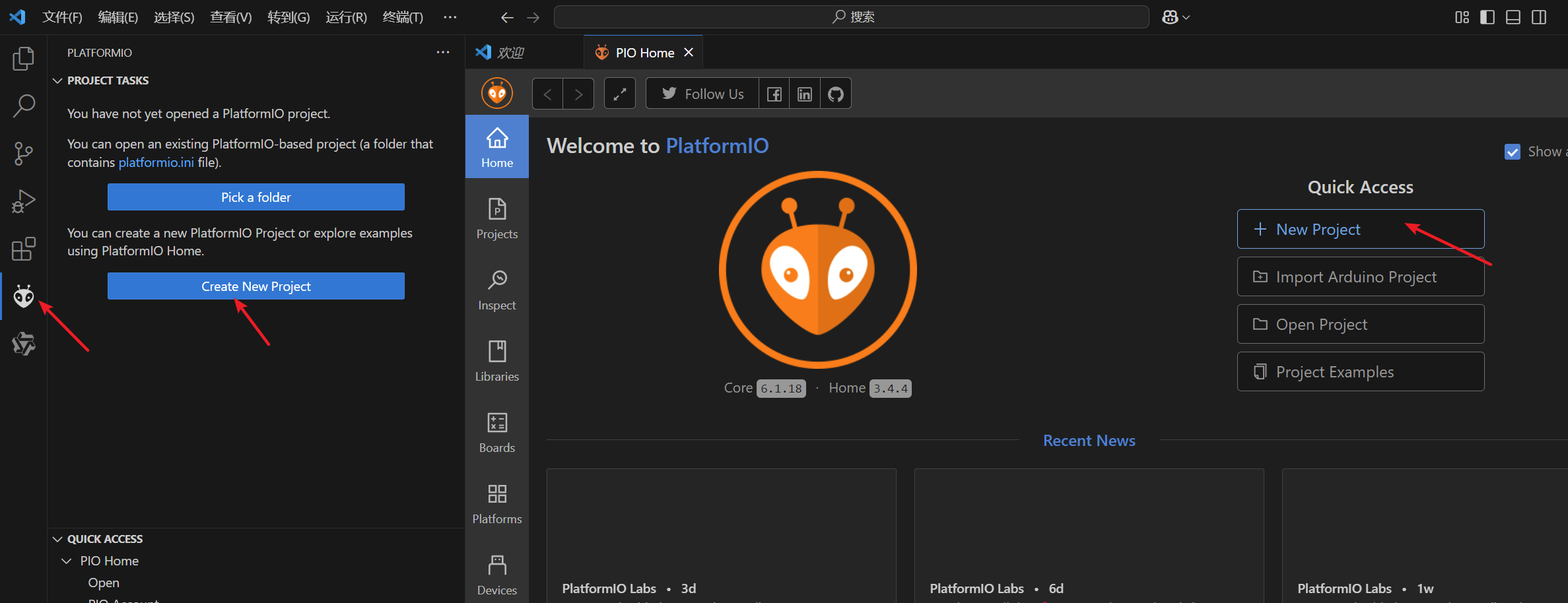
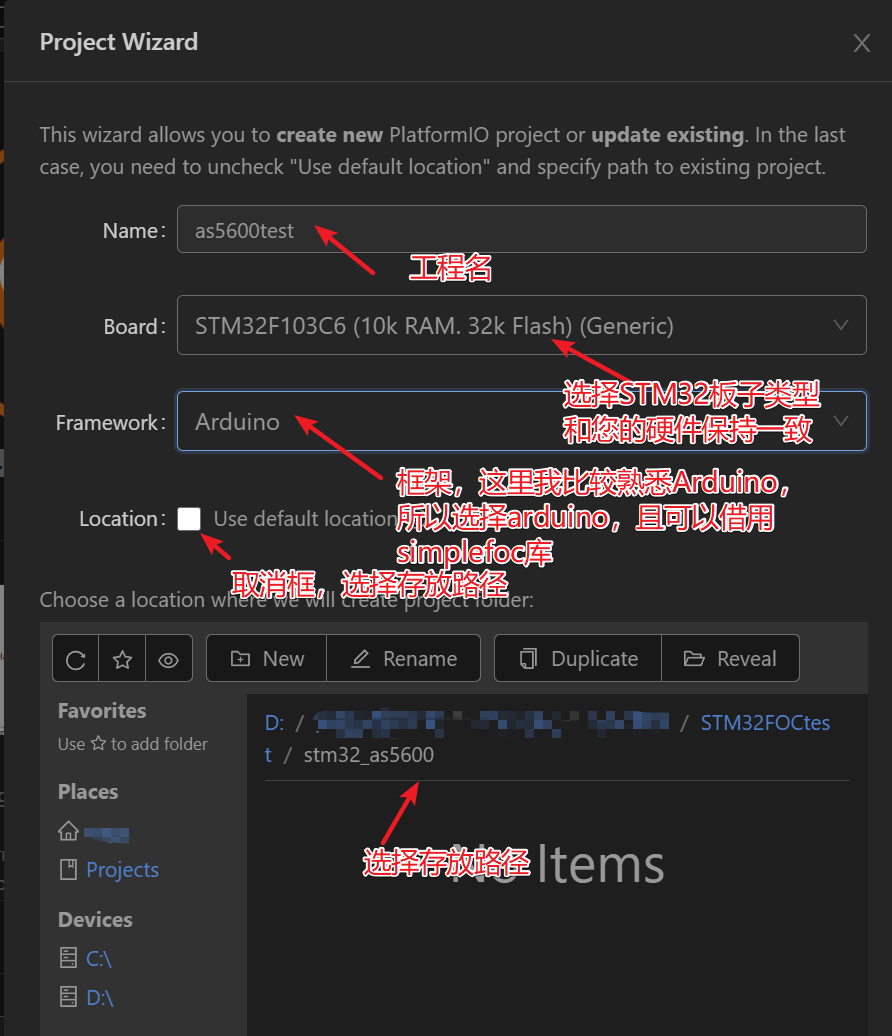
- 打开插件,新建工程
- 重要的设置
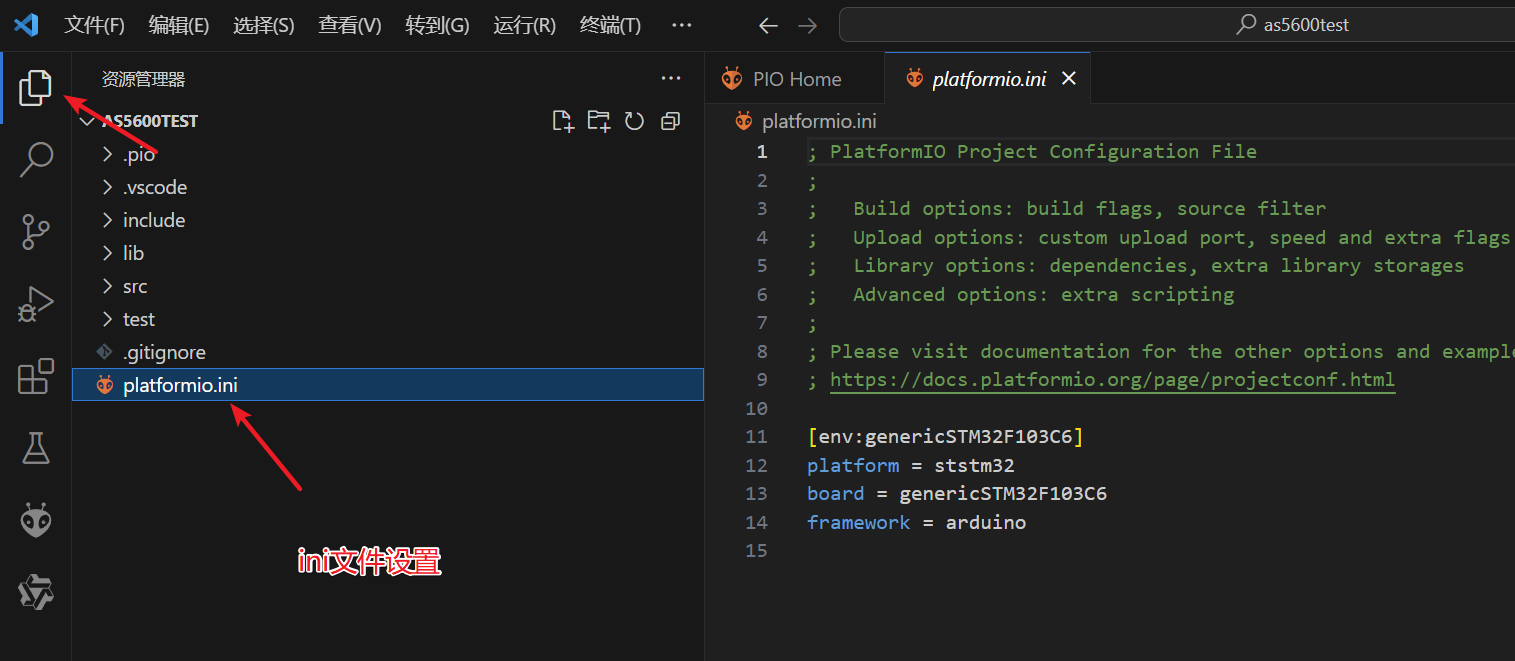
- Ini文件设置,这是关键
M创动工坊提供mcdgf.taobao.com
STM32核心板,MT6701磁编码器带线(M创动工坊提供),ST-link,USB线等
安装好stlink驱动
 1870
1870

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


























