



 本文介绍了在ROS Indigo环境下因opencv版本不匹配导致的BadArgument错误,并提供了解决方案,即通过添加最新版本的cv_bridge包并重新编译来解决此问题。
本文介绍了在ROS Indigo环境下因opencv版本不匹配导致的BadArgument错误,并提供了解决方案,即通过添加最新版本的cv_bridge包并重新编译来解决此问题。
最近在ros下调试程序时,遇到了Bad argument (Invalid pointer to file storage) in cvGetFileNodeByName这个错误:
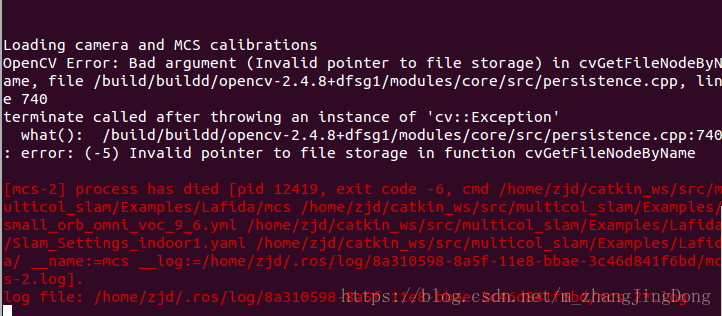
本人系统配置如下:ubuntu14.04 ,ros indigo,自己重新安装了openc3.1,查询后发现是因为程序需要opencv3.1,然而我的ros中opecnv是opencv2.4,opencv版本不匹配导致该问题。
一个很简单的方法解决该问题,便是在程序所在工作空间中加入最新的cv_bridge包,重新catkin-make,这样就可以解决该问题了。
cv-bridge,下载地址:https://download.youkuaiyun.com/download/m_zhangjingdong/10549176

















 1488
1488

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









