






HC-SR04介绍
- 典型工作电压:5v (如果你的超声波模块没有工作,可以看一下是不是电压不够)
- 超小静态工作电流:<2mA
- 感应角度:<15° (超声波模块,是一个范围式的探索,所以在做测速等一些适合直线传播的项目的时候,不建议使用超声波模块)
- 探测距离:2cm-400cm
- 高精度:可以达到0.3cm
- 盲区:2cm (当物体和超声波模块的距离小于2cm,超声波模块失效)
工作原理
- 采用IO触发测距,给至少10us的高电平。
- 模块自动发送8个4kHz的方波,自动检测是否有信号返回。
- 有信号返回,通过IO输出一高电平,高电平的持续时间就是超声波从发射到返回的时间
测试距离=(高电平时间*声速)/2
因为声音会来回两段,所以要除以二,声速我们一般取340m/s
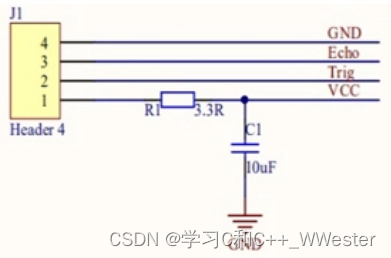
接口定义
Vcc,Trig(控制端),Echo(接收端),GND
向Trig发送10us以上的高电平,就可以在Echo等待高电平输出,一有输出就可以打开定时器计时,当Echo变为低电平时,就可以读定时器的值,此时就为此次测距的时间,就可以算出距离,不断周期性的测量,就可以达到你移动测量的值。
思路
- IO输出=》Trig,IO输入《=Echo
- 给Trig管脚一个>10us的高电平(启动)
- 启动后,Echo开启计时器计数,等待检验,进入while(Echo==1),当Echo不等于高电平的啥时候结束while,关掉计时器。
- 设开启定时器时间为T1,关闭定时器时间为T2,所得时间T即等于T2-T1,所以测距距离即为(T2-T1)*340/2
代码
配置Echo和Trig
void Echo_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
void Trig_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
} 然后配置TIM2
void TIM2_Count_Configuration(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_TimeBaseStructure.TIM_Period = 0xFFFF;
TIM_TimeBaseStructure.TIM_Prescaler = 71;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_Cmd(TIM2, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, DISABLE);
}在define几个等下用到的函数
#define TRIG_H GPIO_WriteBit(GPIOA,GPIO_Pin_9,Bit_SET)
#define TRIG_L GPIO_WriteBit(GPIOA,GPIO_Pin_9,Bit_RESET)
#define ECHO GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_8)
main
int main(void)
{
unsigned int time = 0;
float distance = 0.00;
void Echo_Configuration();
void Trig_Configuration();
void TIM2_Count_Configuration();
RCC_APB2PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
while(1)
{
TIM_Cmd(TIM2,ENABLE);
TRIG_H;
Delay_us(15);
TRIG_L;
while(ECHO == 0);
TIM_SetCounter(TIM2,0);
while(ECHO == 1);
TIM_Cmd(TIM2,DISABLE);
time = TIM_GetCounter(TIM2);
distance = time * 0.017;
printf("Distance = %.2fcm\n", distance);
Delay_us(1000000);
}
}- 配置Echo,Trig和TIM2,使能RCC_APB1Periph_TIM2
- TIM_Cmd(TIM2,ENABLE) 使能TIM2
- TRIG_H 给TRIG高电平,等待15us,TRIG_L给TRIG低电平
- while(ECHO==0) 如果ECHO为低电平,就复位TIM2为0
- while(ECHO==1) 如果ECHO为高电平,TIM_Cmd(TIM2,DISABLE);关闭TIM2
- time = TIM_GetCounter(TIM2);记录时间为time
- 计算距离distance = time * 0.017;


















 2501
2501

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











