







 本文介绍了如何使用open3d库结合拉格朗日乘子法对点云数据进行平面拟合,包括算法步骤、Python代码示例以及如何通过最小二乘法找到最优平面参数。通过实例展示了从原始点云数据到投影在平面上的过程。
本文介绍了如何使用open3d库结合拉格朗日乘子法对点云数据进行平面拟合,包括算法步骤、Python代码示例以及如何通过最小二乘法找到最优平面参数。通过实例展示了从原始点云数据到投影在平面上的过程。
一、算法原理
1.算法步骤
对k一近邻点拟合平面,最小二乘法(平面过重心),拟定公式为
a
(
x
−
x
)
+
b
(
y
−
y
)
+
c
(
z
−
z
)
=
0
a(x-\frac{}{x}) + b(y-\frac{}{y}) + c(z-\frac{}{z}) =0
a(x−x)+b(y−y)+c(z−z)=0
- 求重心
x = 1 N ∑ i = 1 N x i , y = 1 N ∑ i = 1 N y i , z = 1 N ∑ i = 1 N z i \frac{}{x}=\frac{1}{N}\sum_{i=1}^{N}{xi},\frac{}{y}=\frac{1}{N}\sum_{i=1}^{N}{yi},\frac{}{z}=\frac{1}{N}\sum_{i=1}^{N}{zi} x=N1i=1∑Nxi,y=N1i=1∑Nyi,z=N1i=1∑Nzi - 去重心化
x = x i − x , y = y i − y , x = z i − z x = xi -\frac{}{x}, y = yi -\frac{}{y}, x = zi -\frac{}{z} x=xi−x,y=yi−y,x=zi−z - 拉格朗日乘子法求函数
m i n ( ∑ i = 1 N i ∗ ∑ i = 1 N i ) = ∑ i = 1 N ( a x + b y + c z ) ∗ ( a x + b y + c z ) min(\sum_{i=1}^{N}{i}*\sum_{i=1}^{N}{i})= \sum_{i=1}^{N}{(ax + by + cz)*(ax + by + cz)} min(i=1∑Ni∗i=1∑Ni)=i=1∑N(ax+by+cz)∗(ax+by+cz)
4 求偏导
1.4.1 对a求偏导
2
x
i
∑
i
=
1
N
a
x
i
+
b
y
i
+
c
z
i
2xi\sum_{i=1}^{N}{axi+byi+czi}
2xii=1∑Naxi+byi+czi
1.4.2 对b求偏导
2
y
i
∑
i
=
1
N
a
x
i
+
b
y
i
+
c
z
i
2yi\sum_{i=1}^{N}{axi+byi+czi}
2yii=1∑Naxi+byi+czi
1.4.3 对c求偏导
2
z
i
∑
i
=
1
N
a
x
i
+
b
y
i
+
c
z
i
2zi\sum_{i=1}^{N}{axi+byi+czi}
2zii=1∑Naxi+byi+czi
1.4.3 矩阵化
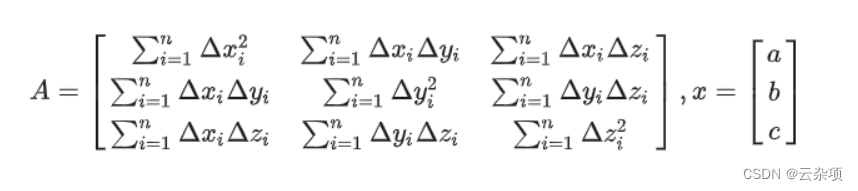
- 求出最小特征向量
二、代码
import open3d as o3d
import numpy as np
def plane(pcd, normal_vector):
"""
Args:将点云投影到平面
pcd: 点云数据
normal_vector: 方程法向量 mx + ny + sz + d = 0 传入[m , n, s, d]
Returns: 投影后的点云数据
"""
plane_seeds = [] # 保存投影后的点云数据
# 获取平面系数
m = normal_vector[0]
n = normal_vector[1]
s = normal_vector[2]
d = normal_vector[3]
# 将点云转换为数组
points = np.asarray(pcd.points)
for xyz in points:
x, y, z = xyz
"""
t = -(m*x + n*y + s*z + d) / (m*m + n*n + s*s) # 计算参数方程参数
"""
t = -(m * x + n * y + s * z + d) / (m * m + n * n + s * s) # 计算参数方程参数
"""
xi = m*t + x # 计算x的投影
yi = b*t + y # 计算y的投影
zi = s*t + z # 计算z的投影
"""
xi = m * t + x # 计算x的投影
yi = n * t + y # 计算y的投影
zi = s * t + z # 计算z的投影
plane_seeds.append([xi, yi, zi]) # 将投影后的点云添加到数组中
plane_cloud = o3d.geometry.PointCloud() # 使用numpy生成点云
plane_cloud.points = o3d.utility.Vector3dVector(plane_seeds) # points numpy数组
return plane_cloud
if __name__ == '__main__':
pcd = o3d.io.read_point_cloud('res/monkey.ply')
points = np.asarray(pcd.points) # 将点云转换为数组
# 调用函数,生成离散点
x, y, z = points[:, 0], points[:, 1], points[:, 2]
# 求重心
x0 = np.mean(x) # 计算平均值
y0 = np.mean(y) # 计算平均值
z0 = np.mean(z) # 计算平均值
# 去重心
x = x - x0
y = y - y0
z = z - z0
# ------------------------构建系数矩阵-----------------------------
A = np.array([[np.sum(x * x), np.sum(x * y), np.sum(x * z)],
[np.sum(x * y), np.sum(y * y), np.sum(y * z)],
[np.sum(x * z), np.sum(y * z), np.sum(z * z)]])
[D, X] = np.linalg.eig(A) # 计算矩阵的特征值和特征向量的函数
# 找到最小特征值的索引
min_eigenvalue_index = np.argmin(D)
# 获取对应的特征向量
min_eigenvector = X[:, min_eigenvalue_index]
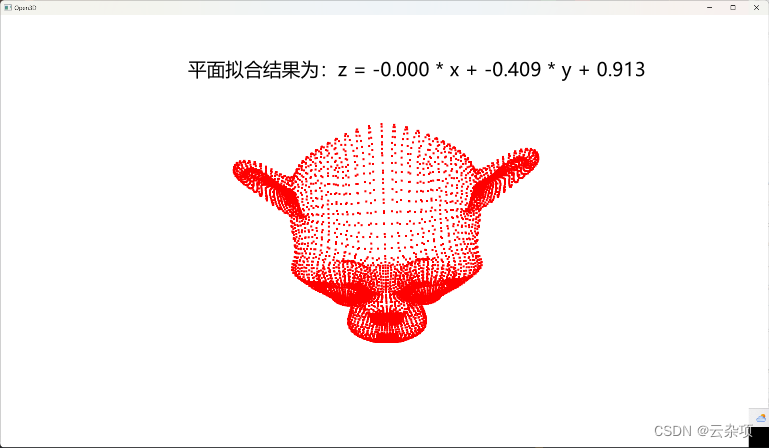
print('平面拟合结果为:z = %.3f * x + %.3f * y + %.3f' % (min_eigenvector[0], min_eigenvector[1], min_eigenvector[2]))
# 平面参数
a, b, c, d = min_eigenvector[0], min_eigenvector[1], min_eigenvector[2], -min_eigenvector[0]*x0 - min_eigenvector[1]*y0 - min_eigenvector[2]*z0
plane_cloud = plane(pcd, [a, b, c, d]) # 获得投影后的点云数据
# ------------------ 可视化点云 -----------------
plane_cloud.paint_uniform_color([1, 0, 0.0]) # 渲染颜色
o3d.visualization.draw_geometries([pcd, plane_cloud])
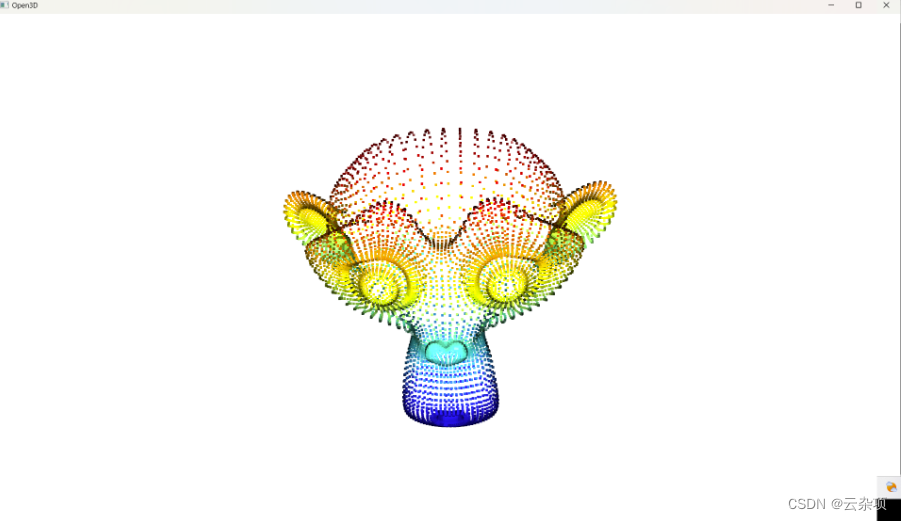
三、结果
1.原点云数据
2.将点云拉格朗日乘子法拟合平面投影在该平面
四、相关数据
open3d 将点云投影到平面-优快云博客:open3d 将点云投影到平面-优快云博客
拉格朗日乘子法理论参考:最小二乘拟合平面(python/C++版) - 知乎 (zhihu.com)


















 1500
1500

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











