






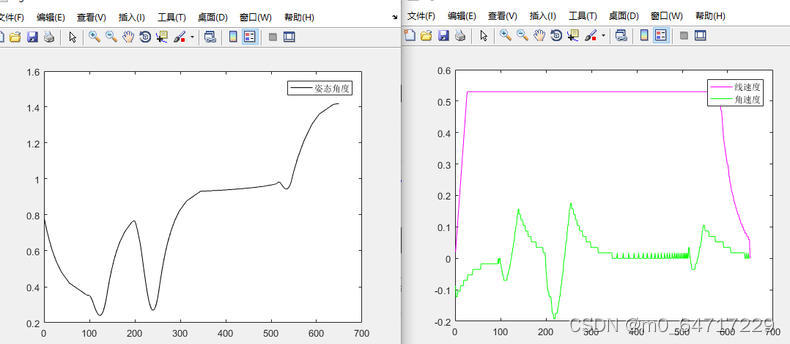
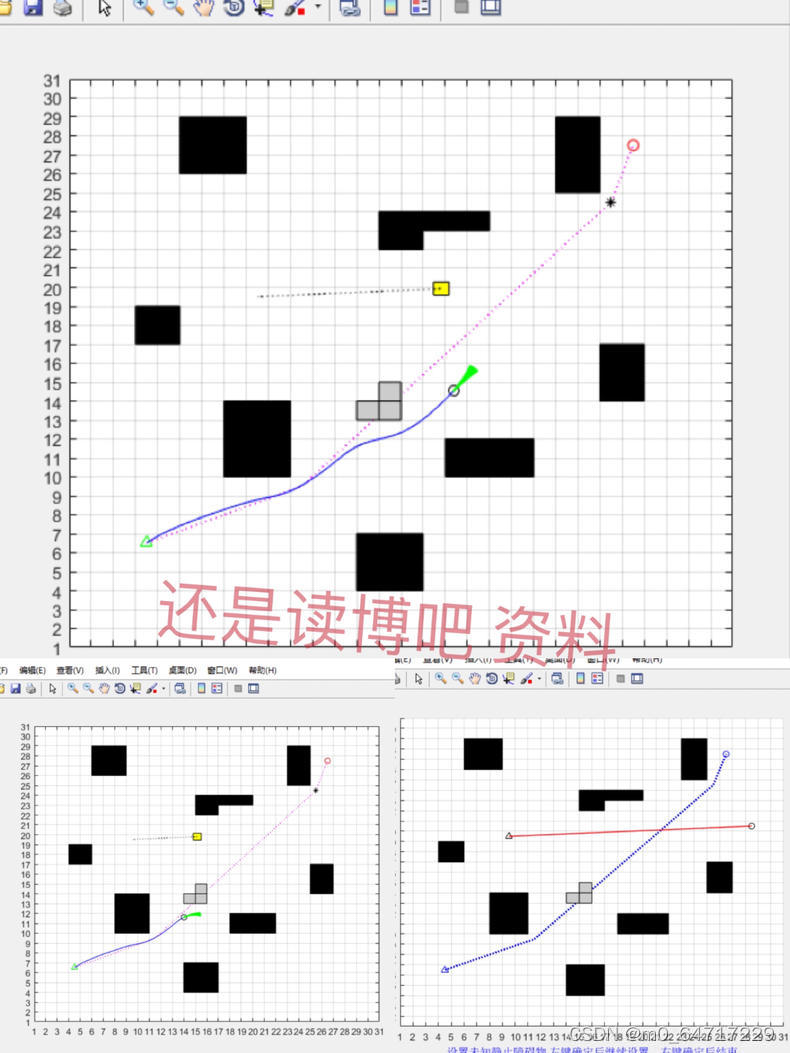
 该博客探讨了一种融合A*搜索算法与动态窗口法(DWA)的路径规划方法,旨在实现对已知和未知静态障碍物,以及未知动态移动障碍物的有效避障。通过这种结合,算法能更好地适应复杂环境,提高机器人导航的灵活性和安全性。
该博客探讨了一种融合A*搜索算法与动态窗口法(DWA)的路径规划方法,旨在实现对已知和未知静态障碍物,以及未知动态移动障碍物的有效避障。通过这种结合,算法能更好地适应复杂环境,提高机器人导航的灵活性和安全性。
改进A*与融合DWA算法 融合路径规划算法 动态窗口法 A星 Astar
能够实现已知静态障碍物避障,未知静态障碍物避障,未知动态移动障碍物避障功能
id=656112466836&
改进A*与融合DWA算法 融合路径规划算法 动态窗口法 A星 Astar
能够实现已知静态障碍物避障,未知静态障碍物避障,未知动态移动障碍物避障功能
id=656112466836&
 1517
537
1517
537

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























