



概要
惯性导航技术作为一个小众但又关键的技术非常值得去学习探索,博主在研究生期间也是开始入门惯性导航方面的研究,非常乐意分享自己对惯性导航的学习理解,同时也是希望能够得到学习成长的机会,也请各位积极纠错哈!本文能主要从惯性导航的基本架构出发,从整体上讲述惯性导航算法,并进行matlab代码编写。后面也会出惯性导航的各个部分的理解。
惯性导航总体设计思路
惯性导航主要利用加速度计与陀螺仪的输出进行导航算法的解算,从而得到载体的最终姿态、速度与位置。虽然惯导的误差有点大,但是和GPS等进行组合导航后效果会大幅提升,因此,学习了解惯导还是很有用的(这是博主自己的想法哈)。
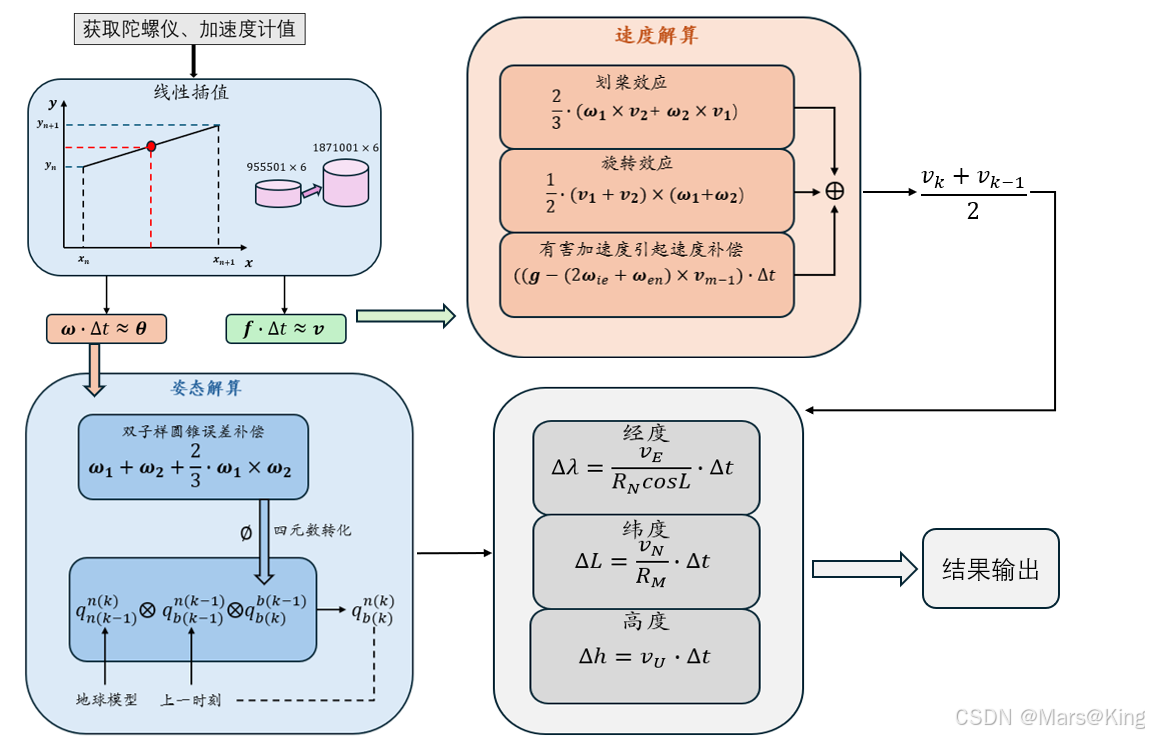
如下是整体算法的架构图:
导航算法主要分为三个部分:姿态解算、速度解算、位置解算。惯导算法的目的就是将加速度计与陀螺仪的输出求解出载体的姿态角、速度与位置。插值是将加速度计与陀螺仪的输出数据进行增加,好像对最后结果没有什么太大帮助。
代码思路
初始化参数设置
该部分主要是为了将载体初始的位置进行记录,因为惯性导航是已知载体初始状态信息后,至此在不受外界任何信息下,仅通过算法解算加速度计与陀螺仪的输出数据后,进行导航定位,得到每时刻的载体状态信息(姿态角、速度与位置)。
TS = 0.001; % 此处是加速度计与陀螺仪的输出周期 mg = 9.8e-3;% 设置重力加速度 deg_rad = pi/180; % 弧度转化 V0 = [0;0;0]; % 设置初始速度(东北天) Att0 = [0;0;0]*deg_rad; % 设置初始姿态角(俯仰、横滚、航向) Pos0 = [0*deg_rad;0*deg_rad;0] % 设置初始位置(经度、纬度、高度),此处高度不需要转化当然如果要设计一个完整的代码还需要将数据进行保存。后续会以任务的形式将代码完整编写出来。
导航解算
该部分可以理解为一个“黑盒”,输入是角增量与比力增量,输出是载体的姿态角、速度、位置。具体内容见后面文章慢慢分享。
小结
本专题会已任务的形式将惯性导航算法进行逐步拆解,最终完成整个惯性导航算法的设计。有兴趣的可以看我专栏后续内容发布在专栏里惯性导航算法设计哦!


















 8671
8671

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











