






摘要
摘要——本文考虑了一个点对点集成感知和通信(ISAC)系统,其中发射机通过离散无记忆信道(DMC)向接收机传输消息,并同时通过发射波形的反向散射信号估计信道状态。我们推导了有限块长度下的可达性和收敛界限,并表征了所提出设置的二阶率失真误差区域。数值结果表明,与传统的时分复用方案相比,我们提出的联合ISAC方案在感知和通信任务间分配可用资源时显著优于传统方案。
I. 引言
将感知能力集成到通信网络中是解决即将到来的第六代(6G)无线通信系统挑战的一种有前途的方法[1-5]。实际上,网络感知功能是一种使能技术,允许从环境中收集传感数据,这在工业机器人和自动驾驶车辆等应用中是必需的。最近的一种范式,称为集成感知和通信(ISAC),建议将感知功能完全集成到通信功能中[6-8]。换句话说,ISAC系统共同执行感知和通信任务,使用共同的硬件、天线和频谱。这种联合方法的好处包括降低硬件和信令成本以及提高能源消耗和频谱效率[9]、[10]。
尽管有大量关于ISAC的研究工作,但最优系统的基本性能限制,以及感知和通信性能之间的固有权衡仍未解决。特别是,虽然[12]-[20]确定了渐近无限块长度下的信息理论基本性能限制,但本文的重点在于有限块长度下实际编码的性能。
具体来说,在本工作中,我们考虑一个点对点ISAC系统,其中发射机通过离散无记忆状态依赖信道向接收机传输消息,并且基于广义反馈信号,估计信道的无记忆状态序列,以最小化给定的失真准则。我们推导了通信速率和解码错误与感知失真之间最优权衡的可达性和收敛界限。我们的可达性和收敛界限是紧密的,并且在无限块长度的渐近区域中收敛到三阶项。对于这种渐近区域,我们因此完善了[14]、[16]中关于速率作为允许失真和解码错误概率函数的最优缩放结果。ISAC的有限块长度行为已在[21]中研究过,但那是针对高斯信道模型,其中单一状态(信道系数)控制整个传输,接收机希望以最小可能的平方误差估计该状态。在我们的设置中,状态由影响各种信道用途的无记忆序列描述,估计的目标是以最小失真重建该序列。
II. 问题设置
考虑图1中的点对点设置,其中发射机希望通过状态依赖无记忆信道向接收机传输一个消息,该消息均匀分布在集合
上,并且同时希望基于广义反馈信号估计信道状态序列。我们考虑具有有限输入字母表
、有限信道状态字母表
、有限反馈字母表
、有限输出字母表
和信道转移律的离散无记忆状态依赖信道
对于给定的条件概率质量函数。
因此,如果,在给定时间
并在观察反馈序列
后,发射机发送输入符号
其中对于任意,编码函数
在适当的域上定义。发射机还根据给定分布
估计独立同分布的信道状态
为
基于块估计函数,该函数在适当的域上定义。
在观察信道输出后,接收机将消息
解码为
其中 是定义在适当域上的解码函数。发射端状态估计的质量通过期望平均每块失真度衡量:
其中 为给定的有界每符号失真函数。解码错误概率定义为:
定义 1:_给定块长度 ,若存在编码、解码和估计函数组
满足以下条件,则称速率-失真-误差三元组
是可实现的:
III 最优估计器
对于所述的无记忆系统,最优状态估计器是作用于发射端观测值 和
的逐符号估计器:
其中
且
该逐符号估计器的最优性证明依赖于马尔可夫链关系:
详见文献[16, 附录A]。
IV 主要结果
给定联合概率质量函数(pmf)为 的随机变量
和
,定义其信息密度:
注意信息密度的期望等于互信息 。信息密度的高阶中心矩定义为:
我们关于速率-失真-误差权衡的主要结果如下。
定理 1(可实现性界):_给定块长度 ,若存在
和常数
满足以下两个条件,则速率-失真-误差权衡
是可实现的:
其中
且互信息 和中心矩
基于联合 pmf
定义。
证明:见第VI节。
我们还有以下逆界。
定理 2(逆界):_给定块长度,若对所有
和满足 (18) 的 pmf
下界成立,则速率-失真-误差三元组
不可实现:
其中
证明:不等式 (20) 的证明步骤与文献[22, Lemma 58]类似,需整合 (10) 中的最优估计器。详见文献[26, 附录A]。
命题 1:_给定 、
和大块长度
,使得三元组
可实现的最大速率
为:
最大化解在所有满足 (18) 式的概率质量函数 上。
证明:由 的可微性及 (19) 和 (21) 式中
与
的形式可得:
将 (23) 代入 (17) 式,(24) 代入 (20) 式即证得命题。
注 1:等式 (22) 与文献[22, Theorem 49]一致,后者确定了有限码长 regime 下 DMC 的二阶编码速率。
V 性能对比与示例
本节通过二进制信道实例数值验证定理1和定理2,并与两种实际常用基线方案进行对比。
A. 时隙共享方案
许多实际系统采用基础资源分配策略:将 次信道使用专用于通信任务,剩余
次专用于感知任务(两者互不协作)。改进方案则允许通信资源辅助基础感知(使用通信最优波形),感知资源辅助通信(使用感知最优波形)。
#### 1) 基础资源分配方案
给定时隙参数 ,基础方案性能为:
失真度:
其中 为最大可实现速率:
为最优可能失真,
为无反馈时的平凡估计器失真:
#### 2) 改进资源分配方案
给定,改进方案性能为:
其中 定义为:
为 (27) 式优化变量),且
按
计算
为 (28) 式优化变量):
B. 伯努利乘性状态二进制信道
考虑信道模型:
其中 ,状态
服从伯努利-
分布
,反馈完美(即
)。采用汉明失真度量
。
通过参数化输入分布 (设
),该信道等效于Z信道:输入0恒输出0,输入1以概率
输出0、概率
输出1。互信息及信息密度中心矩为:
失真度下界推导如下:当 时
,失真为零;当
时最优估计为
(若
)或
(若
)。因此:
即输入分布需满足:
C. 数值分析
图2展示了 、
时 (40) 和 (41) 式的可实现界与逆界。当
较大时两界紧致。此时信道容量
,对应失真
。
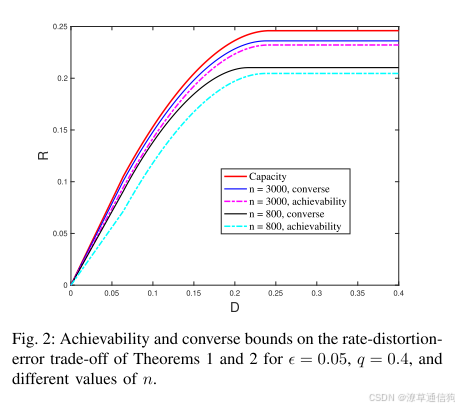
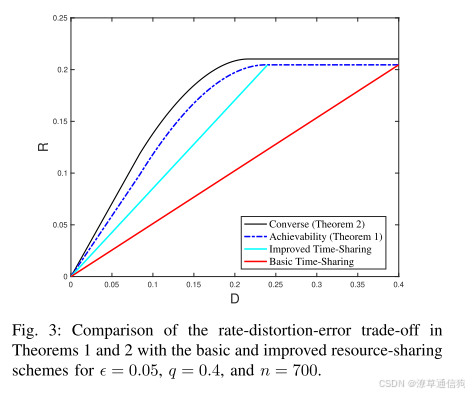
图3对比了本文方案与两种基线方案的性能差距,显示本文方案显著更优。
VI 定理1的证明
A. 码本生成
选择满足 (18) 式的 ,随机独立生成码本
。
B. 编码
发送消息 时,发射端通过码字
编码并传输。
C. 估计
观测反馈序列 后,发射端按 (10) 式估计信道状态。
D. 解码
接收端基于输出 选择最大化信息密度的码字索引:
E. 误差分析
为分析 ,采用文献[22]的阈值度量界。对任意
有:
其中且与
和
独立。设定:
(),并利用Berry-Esseen定理和贝叶斯公式计算(45)式右侧两项。
根据文献[24]强化的Berry-Esseen定理,且因 ,结合(46)式定义可得:
为约束 ,首先通过贝叶斯公式展开:
对任意 有:
因此:
综合(45)、(47)、(53)式得:
其中 由(19)式定义。故当满足下式时错误概率低于
:
等价于:
由此证得(17)式界。
F. 期望失真度
期望失真度可表示为:
因的选择满足约束,方案符合失真度要求。
VII 结论
本文研究了点对点ISAC系统的速率-失真-误差权衡问题,其中发射机通过离散无记忆状态相关信道传输信息,同时估计信道状态。我们推导了有限码长 regime 下的可实现界与逆界,并刻画了该场景的二阶速率-失真-误差区域。数值分析表明:所提联合设计方案显著优于资源分配基线方案(即将资源分割用于感知与通信任务)。本模型中接收机无状态信息,但通过将状态信息纳入接收机输出,我们的定理1和定理2可自然推广至完美/部分状态信息场景。未来研究方向包括:有限码长下广义状态与信道分布的ISAC问题[25]。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











