







 本文探讨了车辆轨迹跟踪控制问题,特别是针对前轮转向车辆,利用模型预测控制策略。该控制算法考虑了车辆的运动学模型、系统约束和目标函数设计。在完全已知的环境及车辆状态条件下,通过线性误差模型描述控制系统,并结合车辆执行机构限制、控制平滑性和稳定性约束来优化目标函数。下一部分将详细阐述车辆运动学建模、目标函数和约束条件的设计,以实现精确的轨迹跟踪。
本文探讨了车辆轨迹跟踪控制问题,特别是针对前轮转向车辆,利用模型预测控制策略。该控制算法考虑了车辆的运动学模型、系统约束和目标函数设计。在完全已知的环境及车辆状态条件下,通过线性误差模型描述控制系统,并结合车辆执行机构限制、控制平滑性和稳定性约束来优化目标函数。下一部分将详细阐述车辆运动学建模、目标函数和约束条件的设计,以实现精确的轨迹跟踪。
基于运动学模型的轨迹跟踪控制(一)
问题描述:
车辆的轨迹跟踪问题是指根据某种控制理论,为系统设计一个控制输入作用,时车辆能够达到并最终以期望的速度跟踪期望轨迹。
再惯性坐标系(即大地坐标系)中,车辆必须从一个给定的初始状态出发,这个初始点可以在期望轨迹上,也可以不在期望轨迹上。
轨迹跟踪问题研究中,进一步对车辆的轨迹跟踪问题做出以下限定:
车辆为前轮转向车辆,而且系统能够提供两类信息,①可行使区域的几何描述(也就是行驶轨迹)、路面特征和路面摩擦系数。②车辆的位置及内部状态,包括横纵向速度、加速度、轮速等参数。
(也就是说:轨迹跟踪控制是在周围环境及车辆内部状态完全已知的情况下进行的,不涉及环境感知和车辆状态的估计)。
基于模型预测控制的轨迹跟中流程:
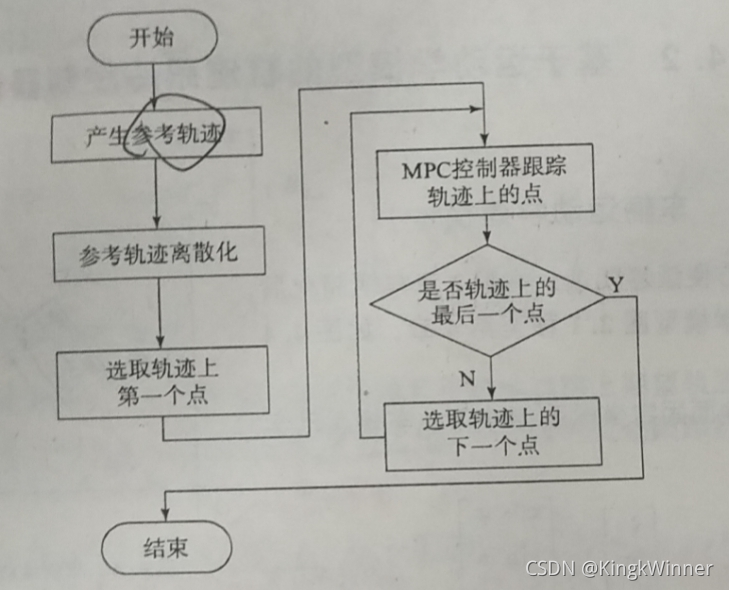
下图中的虚线框是模型预测控制器的主体(主要由线性误差模型、系统约束及目标函数组成)。
- 线性误差模型是估计跟踪控制系统的数学描述,是构成控制算法的基础。
- 系统约束包括车辆执行机构约束(比如前轮转角的极限值或者前轮转角增量的极限值)、控制量平滑约束
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1858
1858

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









