



学习胡春旭《ROS机器人开发实践》第六章,启动rviz可视化界面,模型颜色显示不出来的问题:
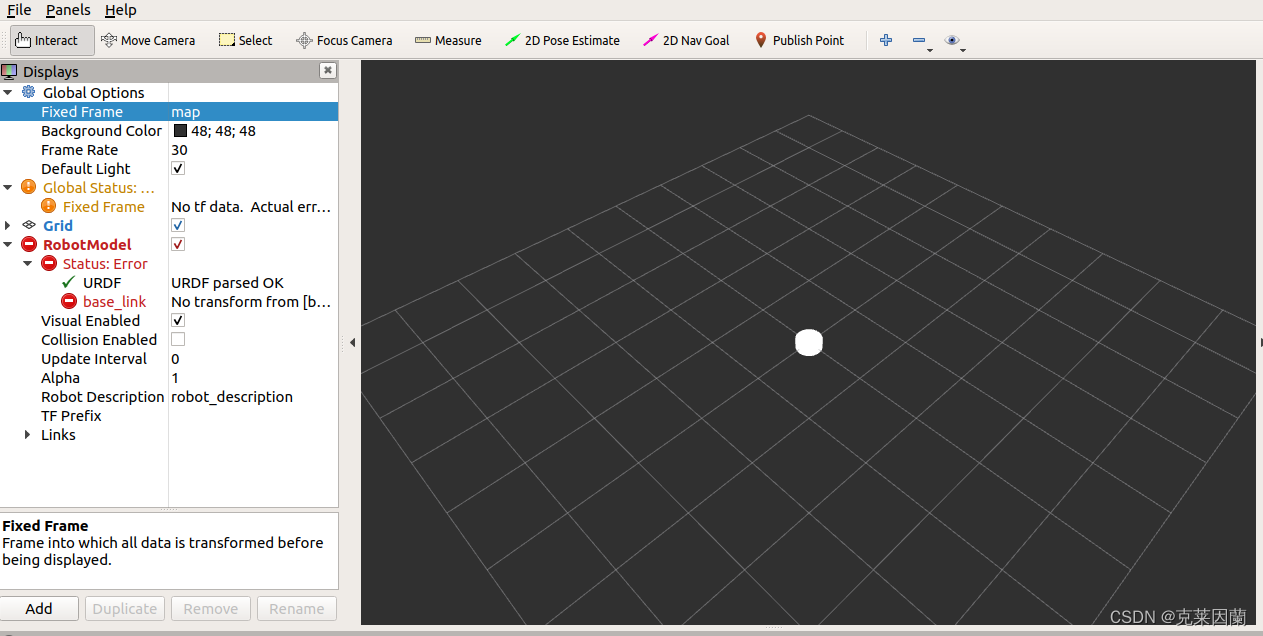
将fixed_map 处改为base_link 即可(手写输入即可)
效果如下:
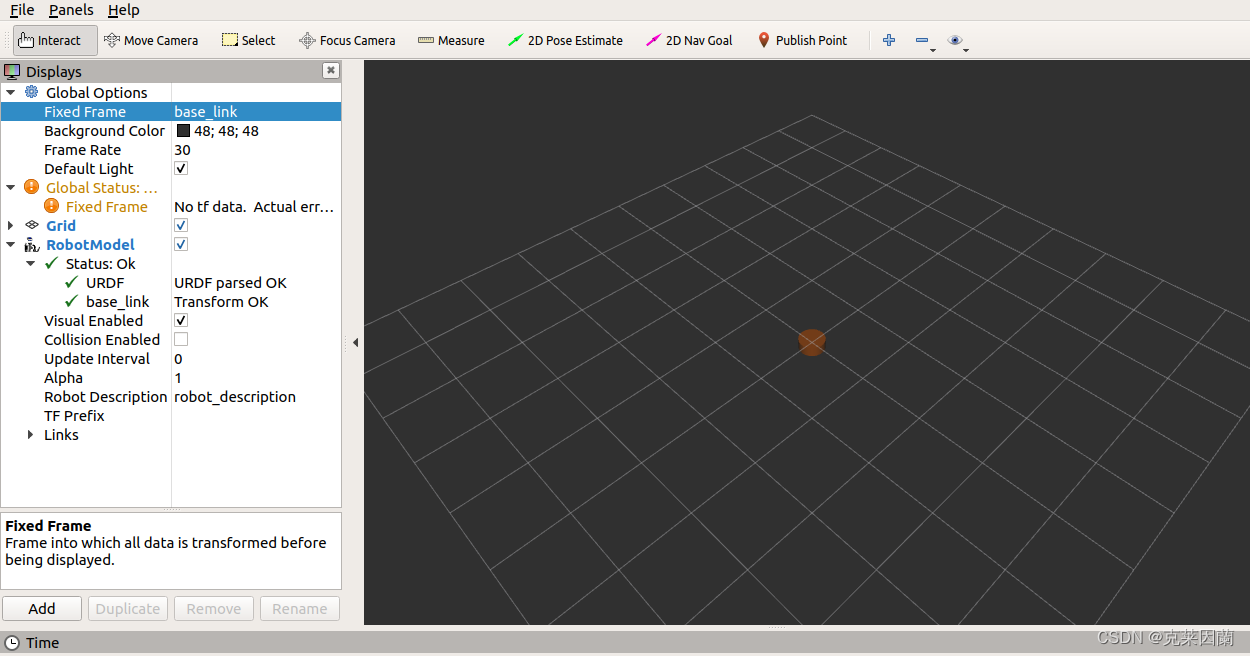
 本文介绍了解决ROS环境下rviz界面中模型颜色无法正常显示的问题。通过将fixed_map更改为base_link,成功使模型颜色得以正确显示。
本文介绍了解决ROS环境下rviz界面中模型颜色无法正常显示的问题。通过将fixed_map更改为base_link,成功使模型颜色得以正确显示。
学习胡春旭《ROS机器人开发实践》第六章,启动rviz可视化界面,模型颜色显示不出来的问题:
将fixed_map 处改为base_link 即可(手写输入即可)
效果如下:
 4738
4738

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























