






 本文介绍了C/C++中内存分配相关知识。程序内存由BSS段、data段、text段组成,BSS段存放未初始化全局变量,data段存已初始化全局变量,text段存执行代码。还阐述了堆和栈的特点,包括堆用于动态分配,栈由编译器自动释放,并对比了二者在申请方式、系统响应、大小限制和申请效率上的区别。
本文介绍了C/C++中内存分配相关知识。程序内存由BSS段、data段、text段组成,BSS段存放未初始化全局变量,data段存已初始化全局变量,text段存执行代码。还阐述了堆和栈的特点,包括堆用于动态分配,栈由编译器自动释放,并对比了二者在申请方式、系统响应、大小限制和申请效率上的区别。
1、从C/C++的内存分配上来说,堆(heap)和栈(stack)属于内存空间的一段区域。
如图:
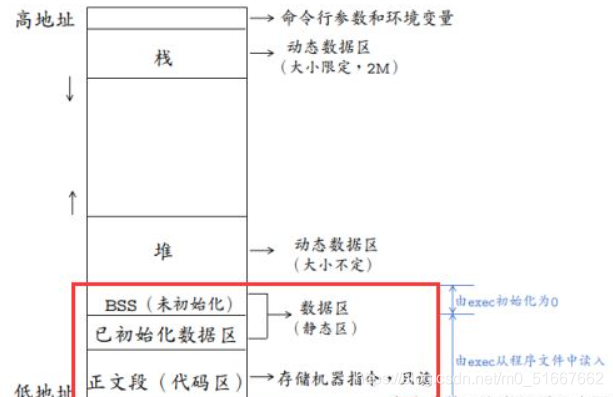
一个程序在内存上由BSS段、data段、text段三个组成的。在没有调入内存前,可执行程序分为代码段、数据区和未初始化数据区三部分。
BSS段:(Block Started by Symbol)通常是指用来存放程序中未初始化的全局变量的一块内存区域,属于静态内存分配。BSS段的内容并不存放在磁盘上的程序文件中。原因是内核在程序开始运行前将它们设置为0,需要存放在程序文件中的只有正文段和初始化数据段。text段和data段在编译时已经分配了空间,而BSS段并不占用可执行文件的大小,它是由链接器来获取内存的。
数据段:(data segment)通常是指用来存放程序中已初始化的全局变量的一块内存区域,属于静态内存分配。总结为:初始化的全局变量和静态变量在已初始化区域,未初始化的全局变量和静态变量在BSS区。
代码段:(code segment/text segment)通常是指用来存放程序执行代码的一块内存区域。该区域的大小在程序运行前就已经确定,并且内存区域通常属于只读, 某些架构也允许代码段为可写,即允许修改程序。在代码段中,也有可能包含一些只读的常数变量,例如字符串常量等。
堆(heap):用于动态分配内存,位于BSS和栈中间的地址区域,由程序员申请分配和释放。堆是从低地址位向高地址位增长,采用链式存储结构。频繁的malloc/free造成内存空间的不连续,会产生碎片。当申请堆空间时库函数是按照一定的算法搜索可用的足够大的空间,因此堆的效率比栈要低的多。注:与数据结构中的堆不是一个概念,但堆的分配方式类似于链表。
栈(stack): 由编译器自动释放,存放函数的参数值、局部变量等。每当一个函数被调用时,该函数的返回类型和一些调用的信息被存放到栈中,这个被调用的函数再为它的自动变量和临时变量在栈上分配空间。每调用一个函数一个新的栈就会被使用。栈区是从高地址位向低地址位增长的,是一块连续的内存区域,最大容量是由系统预先定义好的,申请的栈空间超过这个界限时会提示溢出。
2、区别
1.申请方式
堆是由程序员自己申请并指明大小,在c中malloc函数 如p1 = (char *)malloc(10);
栈由系统自动分配,如声明在函数中一个局部变量 int b; 系统自动在栈中为b开辟空间
2.申请后系统的响应
栈:只要栈的剩余空间大于所申请空间,系统将为程序提供内存,否则将报异常提示栈溢出。
堆:首先应该知道操作系统有一个记录空闲内存地址的链表,当系统收到程序的申请时,会 遍历该链表,寻找第一个空间大于所申请空间的堆结点,然后将该结点从空闲结点链表中删除,并将该结点的空间分配给程序,另外,对于大多数系统,会在这块内 存空间中的首地址处记录本次分配的大小,这样,代码中的delete语句才能正确的释放本内存空间。另外,由于找到的堆结点的大小不一定正好等于申请的大 小,系统会自动的将多余的那部分重新放入空闲链表中。
3.申请大小的限制
栈:在Windows下,栈是向低地址扩展的数据结 构,是一块连续的内存的区域。这句话的意思是栈顶的地址和栈的最大容量是系统预先规定好的,在WINDOWS下,栈的大小是2M(也有的说是1M,总之是 一个编译时就确定的常数),如果申请的空间超过栈的剩余空间时,将提示overflow。因此,能从栈获得的空间较小。
堆:堆是向高地址扩展的数据结构,是不连续的内存区域。这是由于系统是用链表来存储的空闲内存地址的,自然是不连续的,而链表的遍历方向是由低地址向高地址。堆的大小受限于计算机系统中有效的虚拟内存。由此可见,堆获得的空间比较灵活,也比较大。
4.申请效率的比较:
栈由系统自动分配,速度较快。但程序员是无法控制的。
堆是由new分配的内存,一般速度比较慢,而且容易产生内存碎片,不过用起来最方便。

















 8080
8080

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









