







文章目录
1.通信的必要性
在机器人中,一般会集成多个传感器(如:GPS、雷达、温度传感器、摄像头等)和运动控制实现。在ROS中每一个功能对应一个单独的节点(也称进程),为了使机器可以有效运动,进程之间必须使用通信。
简单来说:ROS是进程的分布式框架,为客户提供多线程之间的通信服务。
2.基本通信机制(三种)
-
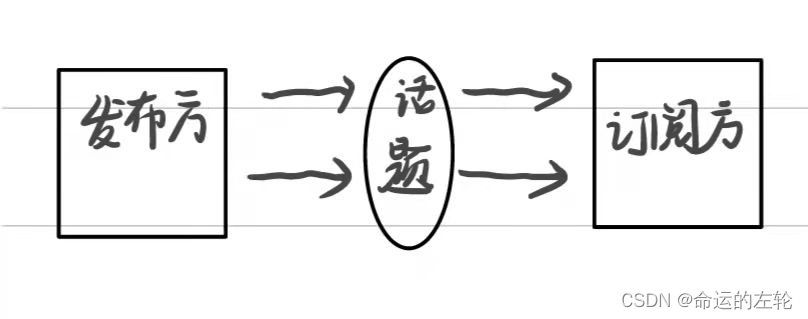
话题通信:发布订阅模式
-
类似模型:我看到了一本刚兴趣的电子书(话题),所以我收藏了他,当小说的作者(发布方)发布新的章节,我(订阅方)得等到作者发出来才可以看到。(发布方和订阅方因为相同的话题联系到一起)
-
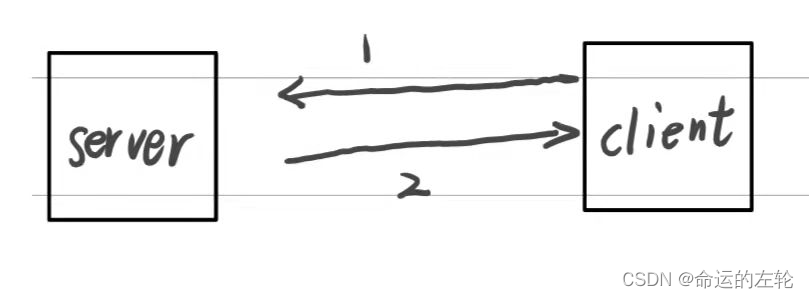
服务通信:请求响应模式
-
类似模型:输入网址访问服务端时,当服务端同意后,客户端才可以显示网页(请求同意)
-
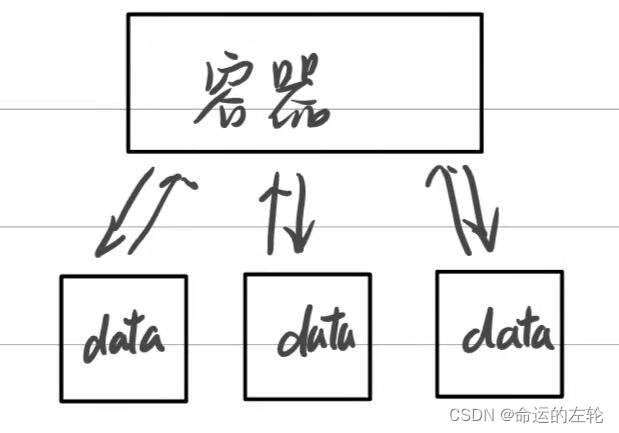
参数服务器:参数共享模式
-
类似模型:储物箱(容器),可以存,也可以取
这是我学习的视频教程,感谢赵虚左老师的讲课。
www.bilibili.com/video/BV1Ci4y1L7ZZ?p=20
如有错误,敬请指正,欢迎交流,谢谢♪(・ω・)ノ

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









