









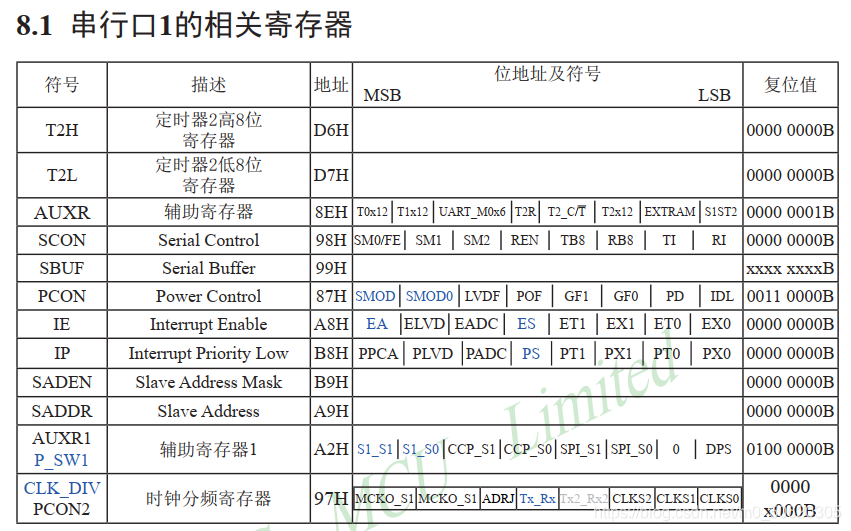
串口通信配置流程:
根据上图中所列寄存器顺序进行配置:
① 设置AUXR 定时器时钟频率及选择串口的波特率发生器
② 设置SCON 串行口的控制寄存器(选择工作模式)
③ 设置PCON 波特率是否倍速
④ T2H T2L设置波特率大小
⑤ ET1 = 0 禁止定时器1中断
⑥ TR1 = 1 启动定时器1
⑦ ES = 1 使能串口中断
①设置AUXR 定时器时钟频率
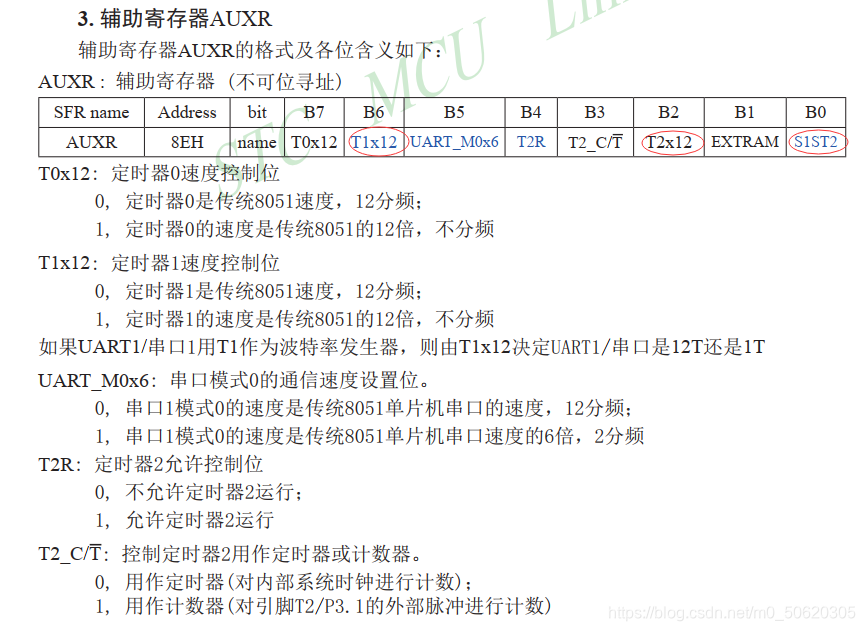
AUXR &= 0xbf; //定时器1时钟为FOSC/12 即12T 为传统8051的速度 1011 1111 B6置0 其余置1 不去影响其他位
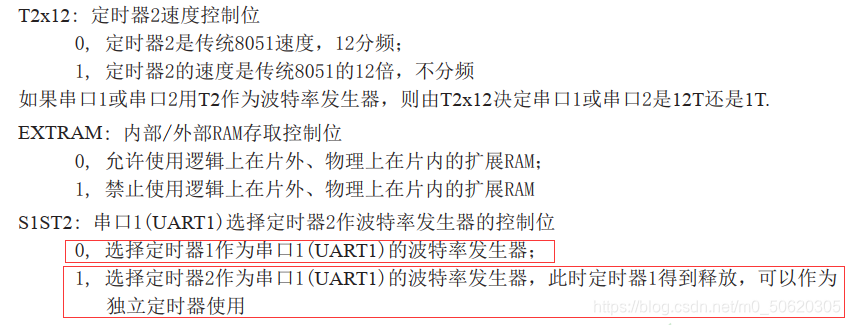
AUXR &= 0xfe; //选择定时器1作为串口1的波特率发生器 1111 1110 B1置0 其余置1 不去影响其他位
②设置SCON 串行口的控制寄存器(选择工作模式)
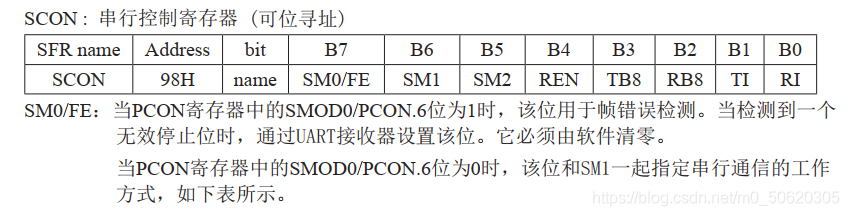
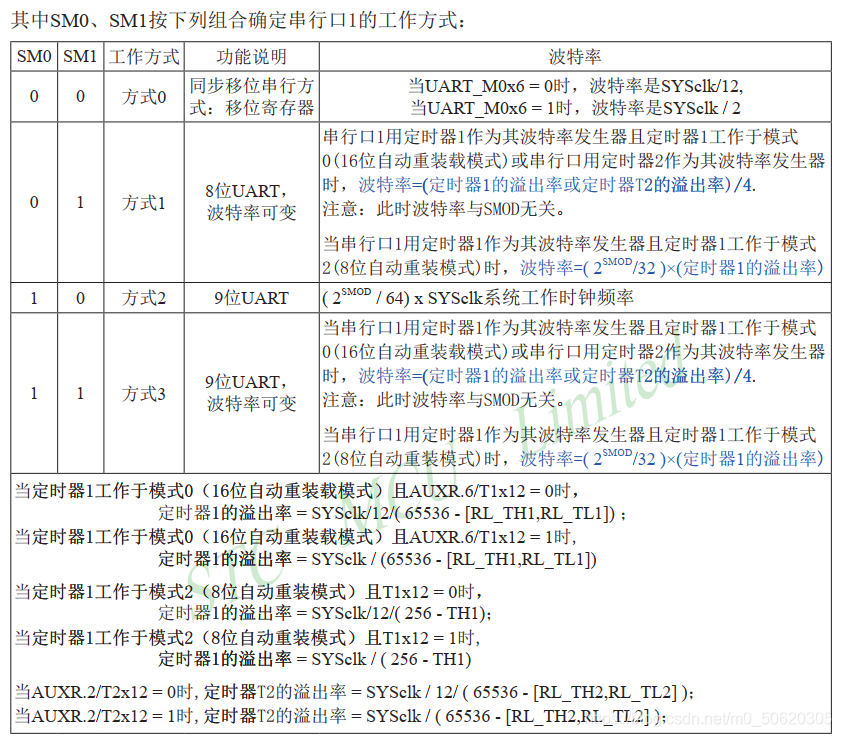
SCON = 0x50; //8位数据 波特率可变 工作方式1 0101 000
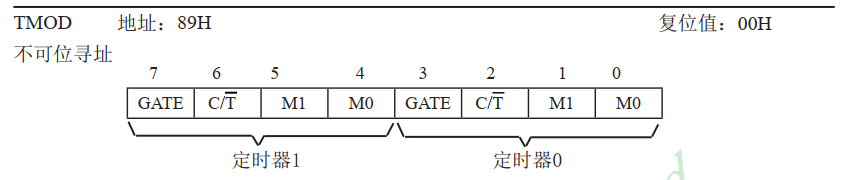
TMOD &= 0x0f; //清除定时器1模式位
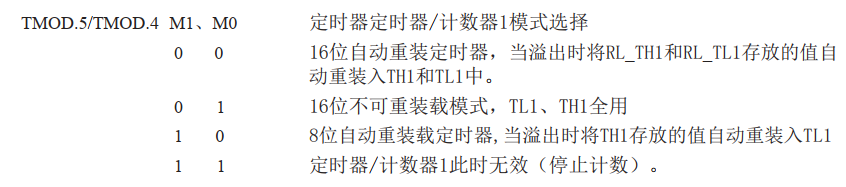
TMOD |= 0x20; //设置定时器1为8位自动重装
③ 设置PCON 波特率是否倍速
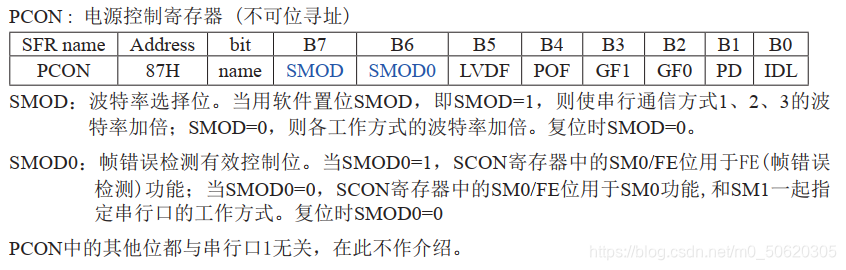
PCON &= 0x7f; // 0111 111 波特率不倍速
④ T2H T2L设置波特率大小
关于波特率,波特率就是发送二进制数据位的速率,一般使用baud表示,就是发送一位二进制数据的持续时间为1/baud。
在通信之前,通信双方的波特率需要设置相同,才能实现正常通信。
在51单片机中,波特率发生器只能由定时器1和定时器2产生,不能使用定时器0。如果使用定时器2需要配置额外的定时器,默认是使用定时器1,而TMOD设置的时8位自动重装。
定时器重载值计算公式根据上图推导:
定时器的溢出率 = SYSclk(晶振) / 12 /(256-TH1)
baud = (2^SMOD/32)* 定时器的溢出率
TH1 = TL1 = 256 - SYSclk/ 12 / 2 / 16 / baud (12T模式)
如果程序中写了PCON |= 0x80; 波特率加倍 计算公式就是:
TH1 = TL1 = 256 - SYSclk/ 12 / 16 / baud (12T模式)
⑤串口发送与接收
串口的发送和接收电路在物理上有两个相同的SBUF寄存器,它们的地址都是0x99,但是一个用来做发送缓冲,一个用来做接收缓冲。
但是如何判断到底是发送还是接收,就看SBUF是在 = 前面,还是在 = 后面。如下所示:
SBUF = 1; //发送 由单片机发送给从机
/*———————————————————————————————————————————————————————————————————————————————————————*/
temp = SBUF; //接收并存入temp变量中 由从机发送给单片机 REN 置1 才能使能接收数据
代码
sys.h
#ifndef __SYS_H__
#define __SYS_H__
//头文件包含
#include <STC15F2K60S2.H>
#include <intrins.h>
//管脚声明
//变量类型声明
typedef unsigned int uint;
typedef unsigned int u16;
typedef unsigned char uchar;
typedef unsigned char u8;
//外部变量声明
//函数声明
void ALL_Init();
void Operate_Delay(unsigned int ms);
void Uart_Init(uint baud);
#endif
main.c
#include "sys.h"
void main()
{
ALL_Init();
Uart_Init(9600);
EA = 1; //开总中断
while(1);
}
Uart.c
#include "sys.h"
#define FOSC 11059200L //系统时钟 11.0592MHZ
void Uart_Init(uint baud)
{
AUXR &= 0xbf; //定时器1时钟为FOSC/12 即12T 为传统8051的速度 1011 1111 B6置0 其余置1 不去影响其他位
AUXR &= 0xfe; //选择定时器1作为串口1的波特率发生器 1111 1110 B1置0 其余置1 不去影响其他位
SCON = 0x50; //8位数据 波特率可变 工作方式1 0101 0000 第4位REN 使能接收数据
TMOD &= 0x0f; //清除定时器1模式位
TMOD |= 0x20; //设置定时器1为8位自动重装
PCON &= 0x7f; // 0111 111 波特率不倍速
TH1 = TL1 = 256 - FOSC/ 12 / 2 / 16 / baud;
ET1 = 0; //禁止定时器1中断
TR1 = 1; //启动定时器1
ES = 1; //使能串口中断
}
void Uart_Interrupt(void) interrupt 4
{
if(RI)//当接收数据完成后 RI = 1;
{
RI = 0; //手动清零接收中断标志位
SBUF = SBUF + 1;//接收到后+1再发送回去
}
if(TI)//当发送数据完成后 TI = 1;
{
TI = 0; //手动清零发送中断标志位
}
}
sys.c
#include "sys.h"
/**
*@brief 外设初始化
*@param[in] none
*@return none
**/
void ALL_Init()
{
P2 = (P2&0x1f)|0xa0; //打开Y5C
P0 = 0x00; //关闭蜂鸣器&继电器
P2 = (P2&0x1f)|0xe0; //打开Y7C
P0 = 0xff; //关闭数码管
P2 = (P2&0x1f)|0x80; //打开Y4C
P0 = 0xff; //关闭LED
P2 = P2&0x1f; //关闭所用使能
}
/**
*@brief 延时函数
*@param[in] 延时多少ms(0~65535)
*@return none
**/
void Operate_Delay(u16 ms)
{
u16 i;
for(ms;ms>0;ms--)
for(i=921;i>0;i--);
}

















 1837
1837

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









