Kinematic Bicycle Model import math dt = 0.1 # 单位:s L = 2.9 #单位:m Lr = 1.4 # 单位:m class State: def __init__(self, x=Lr, y=0.0, yaw=0.0, v=0.0, beta=0.0): self.x = x self.y = y self.yaw = yaw self.v = v self.beta = beta def update(state, a, delta): st








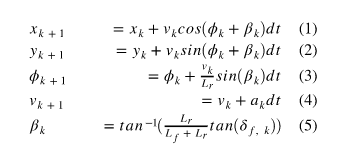
 本文介绍了动力学自行车模型,探讨其在车辆运动学中的应用。
本文介绍了动力学自行车模型,探讨其在车辆运动学中的应用。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4969
4969

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









