







版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
这个驱动适用于所有的STM32系列芯片,使用STM32Cube方式开发,HAL库。如果本篇文章的内容对你有帮助的话,就点个赞鼓励一下吧!
GY-30光照传感器的具体资料网上很多,直接搜索“GY-30光照传感”,或者问淘宝卖家要。所以传感器的这里我就不多介绍了。
用法
STM32Cube开发方式就是4个字“简单高效”
接线:VCC连接3到5伏电压,两根信号线连接自己选定的引脚。
配置:根据“.c”文件(在下面)开头的注释描述在STM32CubeMX中配置好外设。
CubeMX配置
1.软件I2C
- 选择两个GPIO引脚作为软件I2C引脚。示例里选择PB8和PB9
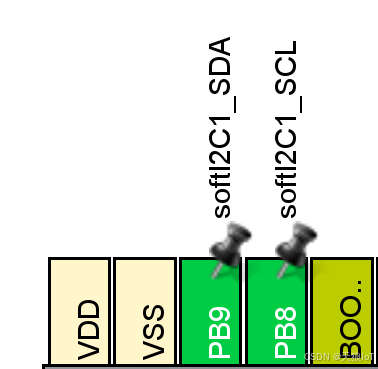
- 用户标签建议命名为softI2C1_SCL,softI2C1_SDA
- PB8默认输出低电平,PB9默认输出高电平;配置为开漏输出、上拉、速度设置为Hign

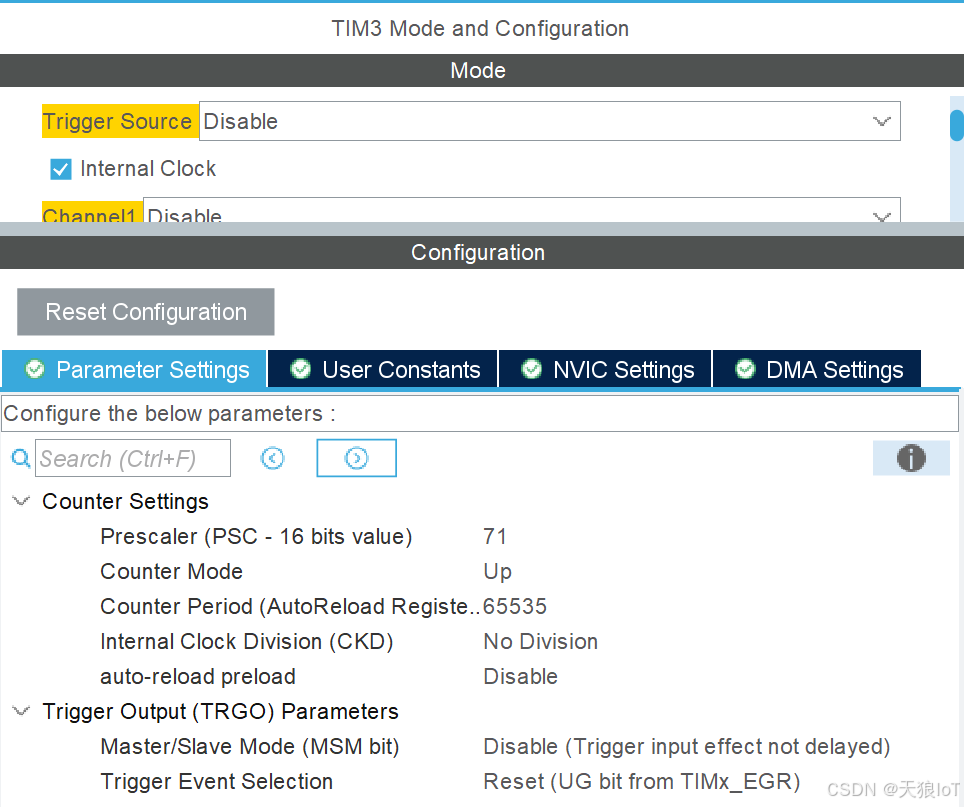
2.毫秒级延时
- 选择定时器,配置为每毫秒计数一次,无需开中断(示例中为TIM3)
定时器配置如下图所示,这里的主频频率配置的是72*10^6。
需要一微秒(1*10^-6秒)所以这里预分频系数=(主频频率/1*10^6)-1=71。预分频系数为0时表示1分频,所以要减去1。
CubeMX配置好以后,直接将下列的驱动代码添加到工作空间中,调用对应函数即可。
gy30.h
#ifndef __GY30_H__
#define __GY30_H__
/********************************************************************************
* 作 者:洛宇航(SiriusIoT)
* 名 称:gy30.h
* 备 注:GY-30光照传感器软件I2C方式驱动代码头文件
********************************************************************************/
#include "main.h"
//main函数里需要使用的就这一个输入亮度变量的地址,返回读取状态
uint8_t getGY30_Lux(uint16_t *nowLum);
void Z_I2C_Start(void);
void Z_I2C_End(void);
void Z_I2C_SendByte(uint8_t byte);
uint8_t Z_I2C_ReveiceByte();
void Z_I2C_SendACK(uint8_t ack);
uint8_t Z_I2C_ReveiceACK();
#endif gy30.c
/********************************************************************************
* 作 者:洛宇航(SiriusIoT)
* 名 称:gy30.c
* 备 注:GY-30光照传感器软件I2C方式驱动代码
* CubeMX配置方法:
* 1.软件I2C
* 选择两个GPIO引脚作为软件I2C引脚。
* 建议命名为softI2C1_SCL,softI2C1_SDA
* 默认输出高电平、开漏输出、上拉、速度设置为Hign
* 2.毫秒级延时
* 选择定时器,配置为每毫秒计数一次,无需开中断(默认为TIM6)
********************************************************************************/
#include "gy30.h"
#include "tim.h"
//外设配置宏定义start
#define DHT_HTIM htim3//微秒级延时,这里使用了定时器3,换定时器的话改这里就行
//定义I2C总线连接的GPIO端口, 只需要修改下面5段行代码即可任意改变SCL和SDA的引脚
#define GPIO_PORT_GY30 GPIOE //GY30 GPIO端口
//软件I2C外设配置
#define GY30_SCL_PORT softI2C1_SCL_GPIO_Port
#define GY30_SCL_PIN softI2C1_SCL_Pin
#define GY30_SDA_PORT softI2C1_SDA_GPIO_Port
#define GY30_SDA_PIN softI2C1_SDA_Pin
//外设配置宏定义end
//定义读写SCL和SDA的宏
//SCL = 1
#define GY30_SCL_1 HAL_GPIO_WritePin(GY30_SCL_PORT, GY30_SCL_PIN, GPIO_PIN_SET)
//SCL = 0
#define GY30_SCL_0 HAL_GPIO_WritePin(GY30_SCL_PORT, GY30_SCL_PIN, GPIO_PIN_RESET)
//读SCL口线状态
#define GY30_SCL_READ HAL_GPIO_ReadPin(GY30_SCL_PORT, GY30_SCL_PIN)
//SDA = 1
#define GY30_SDA_1 HAL_GPIO_WritePin(GY30_SDA_PORT, GY30_SDA_PIN, GPIO_PIN_SET)
//SDA = 0
#define GY30_SDA_0 HAL_GPIO_WritePin(GY30_SDA_PORT, GY30_SDA_PIN, GPIO_PIN_RESET)
//读SDA口线状态
#define GY30_SDA_READ HAL_GPIO_ReadPin(GY30_SDA_PORT, GY30_SDA_PIN)
#define SCL_Pin GPIO_Pin_0
#define SDA_Pin GPIO_Pin_1
//利用定时器微秒级延时
void GY30_Delay_us(uint16_t us)
{
uint16_t differ = 0xffff-us-5;
__HAL_TIM_SET_COUNTER(&DHT_HTIM,differ);
HAL_TIM_Base_Start(&DHT_HTIM);
while(differ < 0xffff-5)
{
differ = __HAL_TIM_GET_COUNTER(&DHT_HTIM);
}
HAL_TIM_Base_Stop(&DHT_HTIM);
}
void I2C_SetSCL(uint8_t signal){
if(signal==1) GY30_SCL_1;
else GY30_SCL_0;
GY30_Delay_us(5); //防止电平翻转过快,因此加上延时
}
void I2C_SetSDA(uint8_t signal){
if(signal==1) GY30_SDA_1;
else GY30_SDA_0;
GY30_Delay_us(5);
}
void I2C_Start(void){
I2C_SetSDA(1);
I2C_SetSCL(1);
I2C_SetSDA(0);
I2C_SetSCL(0);
}
void I2C_End(){
I2C_SetSDA(0);
I2C_SetSCL(1);
I2C_SetSDA(1);
}
void I2C_SendByte(uint8_t byte){
I2C_SetSCL(0);
for(int i=0;i<8;++i){
if((byte&0x80)==0)
I2C_SetSDA(0);
else
I2C_SetSDA(1);
byte<<=1;
I2C_SetSCL(1);
I2C_SetSCL(0);
}
}
uint8_t I2C_ReveiceByte()
{
uint8_t data=0x00;
I2C_SetSDA(1);
for(int i=0;i<8;++i)
{
I2C_SetSCL(1);
if(GY30_SDA_READ==1)
data|=(0x80>>i);
I2C_SetSCL(0);
}
return data;
}
void I2C_SendACK(uint8_t ack)
{
if(ack==0)
I2C_SetSDA(0);
else
I2C_SetSDA(1);
I2C_SetSCL(1);
I2C_SetSCL(0);
}
uint8_t I2C_ReveiceACK()
{
I2C_SetSDA(1);
I2C_SetSCL(1);
uint8_t ack=GY30_SDA_READ;
I2C_SetSCL(0);
return ack;
}
uint8_t getGY30_Lux(uint16_t* nowLum)
{
I2C_Start();
I2C_SendByte(0x46);
if(I2C_ReveiceACK()!=0)
return 0;
I2C_SendByte(0x01);
if(I2C_ReveiceACK()!=0)
return 0;
I2C_End();
I2C_Start();
I2C_SendByte(0x46);
if(I2C_ReveiceACK()!=0)
return 0;
I2C_SendByte(0x10);
if(I2C_ReveiceACK()!=0)
return 0;
I2C_End();
HAL_Delay(200);
uint16_t Light=0;
I2C_Start();
I2C_SendByte(0x47);
if(I2C_ReveiceACK()!=0)
return 0;
Light|=I2C_ReveiceByte();
Light<<=8;
I2C_SendACK(0);
Light|=I2C_ReveiceByte();
I2C_SendACK(1);
I2C_End();
*nowLum = Light;
return 1;
}
















 453
453

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









