




 本文详细介绍了如何在Ubuntu20.04系统中设置软件源,添加ROS(RobotOperatingSystem)的官方镜像,包括配置公钥、更新软件包、安装不同版本的ROS(基础、桌面和完整版)、初始化环境、配置环境变量以及测试ROS基本功能。
本文详细介绍了如何在Ubuntu20.04系统中设置软件源,添加ROS(RobotOperatingSystem)的官方镜像,包括配置公钥、更新软件包、安装不同版本的ROS(基础、桌面和完整版)、初始化环境、配置环境变量以及测试ROS基本功能。
1. Ubuntu系统软件源
链接:ubuntu | 镜像站使用帮助 | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
源文件路径:/etc/apt/sources.list
备份默认源文件,创建新源文件,并选择匹配的源复制进去 #security源不建议替换

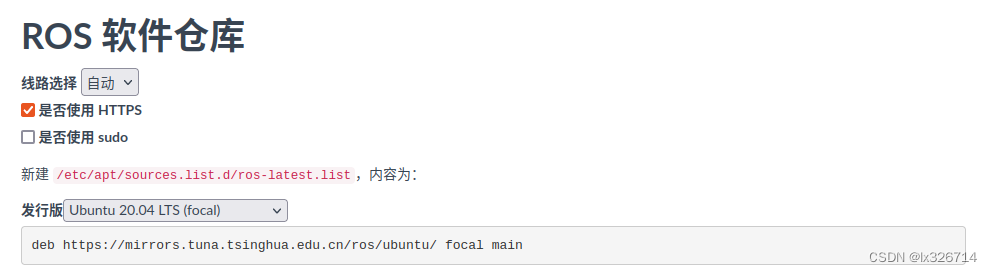
ros源:ros | 镜像站使用帮助 | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
sudo touch /etc/apt/sources.list.d/ros-latest.list
sudo gedit /etc/apt/sources.list.d/ros-latest.list将链接放入指定文件
sudo apt up 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 23万+
23万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









