



 本文详细解读了ORB-SLAM2的运行流程,包括单目、双目和RGBD模式的输入处理,关键帧跟踪、局部建图、闭环检测与融合,以及全局优化。重点介绍了rgbd_tum.cc中的核心代码实现,涉及跟踪、建图和性能分析部分。
本文详细解读了ORB-SLAM2的运行流程,包括单目、双目和RGBD模式的输入处理,关键帧跟踪、局部建图、闭环检测与融合,以及全局优化。重点介绍了rgbd_tum.cc中的核心代码实现,涉及跟踪、建图和性能分析部分。
参考博客
ORB-SLAM2代码详解01: ORB-SLAM2代码运行流程_ncepu_Chen的博客-优快云博客_orbslam2代码详解
ORB-SLAM2详解(二)代码逻辑_sylvester0510的博客-优快云博客_orbslam2代码详解
ORB-SLAM2整体框架如图所示
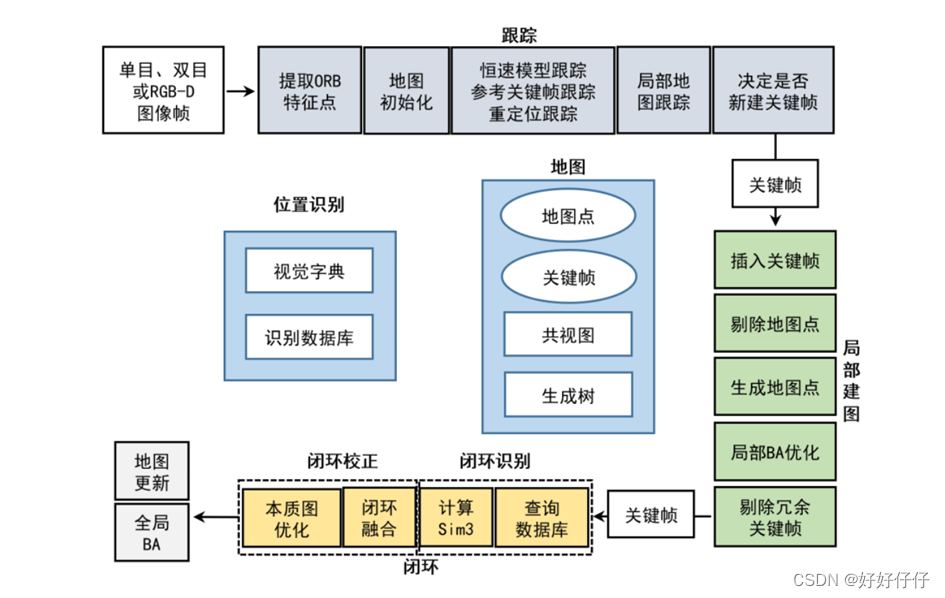
算法流程框架
输入。三种模式:单目、双目、RGBD
跟踪。刚初始化没有速度,所以参考关键帧跟踪。有了速度就进行恒速模型跟踪。都跟丢后进行重定位跟踪。
局部建图。输入跟踪线程里的关键帧。局部地图里的关键帧重新进行特征匹配,生成新的地图点。使用局部BA优化位姿和地图点,随后删除冗余的关键帧。
闭环。通过词袋检测是否闭环,计算当前关键帧和闭环候选关键帧的sim3位姿,然后执行闭环融合和本质图优化(帧与帧之间至少有100个共视地图点)。
全局BA。优化所有关键帧和地图点。
位置识别。导入离线训练好的字典,新输入的图像帧在线转换为词袋向量。应用与特征匹配、重定位、闭环。
地图。地图点+关键帧。关键帧根据共视地图点数目组成共视图(15个地图点),根据父子关系组成生成树。
以RGB-D为例,rgbd_tum.cc的源码:
int main(int argc, char **argv)
{
if(argc != 5)
{
cerr << endl << "Usage: ./rgbd_tum path_to_vocabulary path_to_settings path_to_sequence path_to_association" << endl;
return 1;
}
//按顺序存放需要读取的彩色图像、深度图像的路径,以及对应的时间戳的变量
vector<string> vstrImageFilenamesRGB;
vector<string> vstrImageFilenamesD;
vector<double> vTimestamps;
//从命令行输入参数得到关联文件的路径
string strAssociationFilename = string(argv[4]);
//从关联文件中加载信息
LoadImages(strAssociationFilename, vstrImageFilenamesRGB, vstrImageFilenamesD, vTimestamps);
//彩色图像和深度图像数据的一致性检查
int nImages = vstrImageFilenamesRGB.size();
if(vstrImageFilenamesRGB.empty())
{
cerr << endl << "No images found in provided path." << endl;
return 1;
}
else if(vstrImageFilenamesD.size()!=vstrImageFilenamesRGB.size())
{
cerr << endl << "Different number of images for rgb and depth." << endl;
return 1;
}
//初始化ORB-SLAM2系统
ORB_SLAM2::System SLAM(argv[1],argv[2],ORB_SLAM2::System::RGBD,true);
// 创建一个容器保存跟踪时间
vector<float> vTimesTrack;
vTimesTrack.resize(nImages);
cout << endl << "-------" << endl;
cout << "Start processing sequence ..." << endl;
cout << "Images in the sequence: " << nImages << endl << endl;
cv::Mat imRGB, imD;
//遍历图像序列中的每张图像
for(int ni=0; ni<nImages; ni++)
{
//读取图像
imRGB = cv::imread(string(argv[3])+"/"+vstrImageFilenamesRGB[ni],CV_LOAD_IMAGE_UNCHANGED);
imD = cv::imread(string(argv[3])+"/"+vstrImageFilenamesD[ni],CV_LOAD_IMAGE_UNCHANGED);
double tframe = vTimestamps[ni];
// 判断图像是否为空
if(imRGB.empty())
{
cerr << endl << "Failed to load image at: "
<< string(argv[3]) << "/" << vstrImageFilenamesRGB[ni] << endl;
return 1;
}
#ifdef COMPILEDWITHC11
std::chrono::steady_clock::time_point t1 = std::chrono::steady_clock::now();
#else
std::chrono::monotonic_clock::time_point t1 = std::chrono::monotonic_clock::now();
#endif
// 追踪
SLAM.TrackRGBD(imRGB,imD,tframe);
#ifdef COMPILEDWITHC11
std::chrono::steady_clock::time_point t2 = std::chrono::steady_clock::now();
#else
std::chrono::monotonic_clock::time_point t2 = std::chrono::monotonic_clock::now();
#endif
//计算耗时
double ttrack= std::chrono::duration_cast<std::chrono::duration<double> >(t2 - t1).count();
vTimesTrack[ni]=ttrack;
//根据时间戳,准备加载下一张图片
double T=0;
if(ni<nImages-1)
T = vTimestamps[ni+1]-tframe;
else if(ni>0)
T = tframe-vTimestamps[ni-1];
if(ttrack<T)
usleep((T-ttrack)*1e6);
}
//终止SLAM过程
SLAM.Shutdown();
//统计分析追踪耗时
sort(vTimesTrack.begin(),vTimesTrack.end());
float totaltime = 0;
for(int ni=0; ni<nImages; ni++)
{
totaltime+=vTimesTrack[ni];
}
cout << "-------" << endl << endl;
cout << "median tracking time: " << vTimesTrack[nImages/2] << endl;
cout << "mean tracking time: " << totaltime/nImages << endl;
//保存最终的相机轨迹
SLAM.SaveTrajectoryTUM("./CameraTrajectory2.txt");
SLAM.SaveKeyFrameTrajectoryTUM("KeyFrameTrajectory.txt");
return 0;
}
//从关联文件中提取这些需要加载的图像的路径和时间戳
void LoadImages(const string &strAssociationFilename, vector<string> &vstrImageFilenamesRGB,
vector<string> &vstrImageFilenamesD, vector<double> &vTimestamps)
{
//输入文件流
ifstream fAssociation;
//打开关联文件
fAssociation.open(strAssociationFilename.c_str());
//一直读取,直到文件结束
while(!fAssociation.eof())
{
string s;
//读取一行的内容到字符串s中
getline(fAssociation,s);
//如果不是空行开始分解数据
if(!s.empty())
{
//字符串流
stringstream ss;
ss << s;
//字符串格式:时间戳 rgb图像路径 时间戳 深度图像路径
double t;
string sRGB, sD;
ss >> t;
vTimestamps.push_back(t);
ss >> sRGB;
vstrImageFilenamesRGB.push_back(sRGB);
ss >> t;
ss >> sD;
vstrImageFilenamesD.push_back(sD);
}
}
}
System类
System类是ORB-SLAM2系统的主类,通过调用其他模块实现跟踪、局部建图、闭环等功能。
构造函数
System::System(const string &strVocFile, const string &strSettingsFile, const eSensor sensor, const bool bUseViewer) :
mSensor(sensor), mpViewer(static_cast<Viewer *>(NULL)), mbReset(false), mbActivateLocalizationMode(false), mbDeactivateLocalizationMode(false) {
// step1. 初始化各成员变量
// step1.1. 读取配置文件信息
cv::FileStorage fsSettings(strSettingsFile.c_str(), cv::FileStorage::READ);
// step1.2. 创建ORB词袋
mpVocabulary = new ORBVocabulary();
// step1.3. 创建关键帧数据库,主要保存ORB描述子倒排索引(即根据描述子查找拥有该描述子的关键帧)
mpKeyFrameDatabase = new KeyFrameDatabase(*mpVocabulary);
// step1.4. 创建地图
mpMap = new Map();
// step2. 创建3大线程: Tracking、LocalMapping和LoopClosing
// step2.1. 主线程就是Tracking线程,只需创建Tracking对象即可
mpTracker = new Tracking(this, mpVocabulary, mpFrameDrawer, mpMapDrawer, mpMap, mpKeyFrameDatabase, strSettingsFile, mSensor);
// step2.2. 创建LocalMapping线程及mpLocalMapper
mpLocalMapper = new LocalMapping(mpMap, mSensor==MONOCULAR);
mptLocalMapping = new thread(&ORB_SLAM2::LocalMapping::Run, mpLocalMapper);
// step2.3. 创建LoopClosing线程及mpLoopCloser
mpLoopCloser = new LoopClosing(mpMap, mpKeyFrameDatabase, mpVocabulary, mSensor!=MONOCULAR);
mptLoopClosing = new thread(&ORB_SLAM2::LoopClosing::Run, mpLoopCloser);
// step3. 设置线程间通信
mpTracker->SetLocalMapper(mpLocalMapper);
mpTracker->SetLoopClosing(mpLoopCloser);
mpLocalMapper->SetTracker(mpTracker);
mpLocalMapper->SetLoopCloser(mpLoopCloser);
mpLoopCloser->SetTracker(mpTracker);
mpLoopCloser->SetLocalMapper(mpLocalMapper);
}
这里需要注意,在创建Tracking对象时就已经产生了跟踪线程(构造函数内完成),所以Tracking线程也是主线程。主线程通过持有两个子线程的指针(
mptLocalMapping和mptLoopClosing)控制子线程。
跟踪函数
针对3种不同的传感器(单目/双目/RGBD),System类中有3种追踪函数,分别为TrackRGBD、TrackStereo、TrackMonocular。它们通过调用本类中成员变量mpTracker下的GrabImageMonocular、GrabImageStereo、GrabImageRGBD计算相机位姿并保存跟踪到的地图点。
cv::Mat System::TrackMonocular(const cv::Mat &im, const double ×tamp) {
cv::Mat Tcw = mpTracker->GrabImageMonocular(im, timestamp);
unique_lock<mutex> lock(mMutexState);
mTrackingState = mpTracker->mState;
mTrackedMapPoints = mpTracker->mCurrentFrame.mvpMapPoints;
mTrackedKeyPointsUn = mpTracker->mCurrentFrame.mvKeysUn;
return Tcw;
}这里有点绕,梳理一下
mono_tum.cc调用System类里的TrackMonocular方法,TrackMonocular方法的实现用到了GrabImageMonocular方法,GrabImageMonocular方法是mpTracker中的一个成员函数,而mpTracker是在System初始化时就产生的Tracking类的对象。

















 3335
3335

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









