



目录
数据处理指令是一种能够进行数学运算和逻辑运算的指令。它能够编译生成一条32位的机器码,且能被CPU识别和执行。数据处理指令有多种类型,其中包括数据搬移指令和加法指令等。这些指令通过操作码来指示执行哪种运算,通过目标寄存器来存储运算结果,通过第一操作寄存器来指定第一个参与运算的数据,第二操作数可以是寄存器或立即数,用来指定第二个参与运算的数据
1.1数据搬移指令
@数据搬移指令
MOV R1,#1 @ R1=1, 统一大小写,不能在一个指令既有大写也有小写,例如MoV不可
MOV R2,R1 @ 将一个寄存器的值转到另外一个上
MVN R1,#0xFF @R1 = ~0xFF 按位取反 @0xFF为0x000000FF
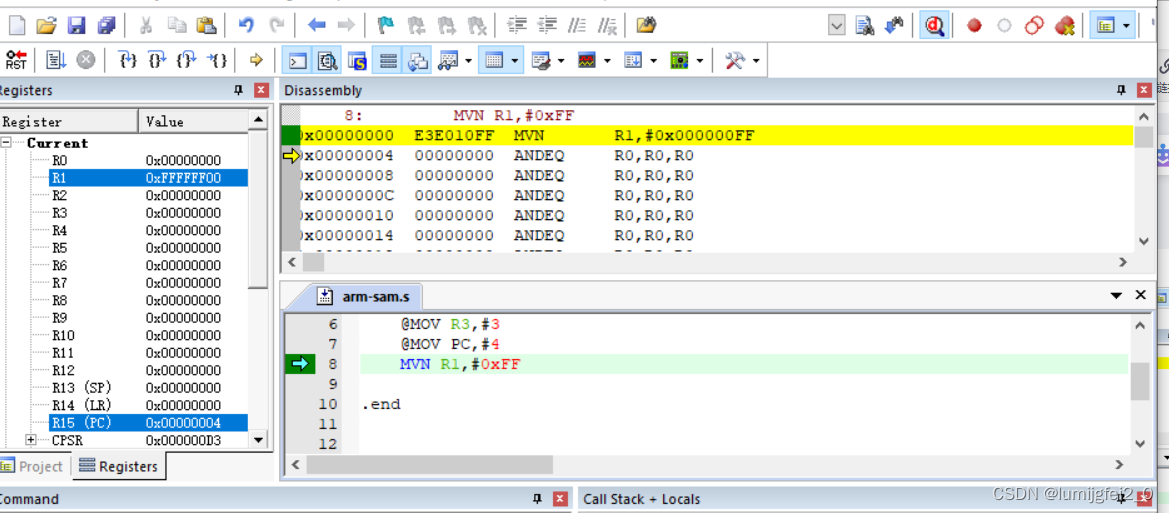
机器码和汇编语言是一一对应的,不同的指令对应的机器码前三位不同。操作不一样的寄存器或者对相同的寄存器搬移不同数据机器码也不同
1.2立即数
立即数的本质:包含在指令当中的数,属于指令的一部分
立即数的优点:取址的时候就可以将其读到CPU,不用单独去内存读取,速度快
立即数的缺点:不能是任意的32位的数字,有局限性
(如何判断立即数)
MOV RO,#0x12345678 @error报错
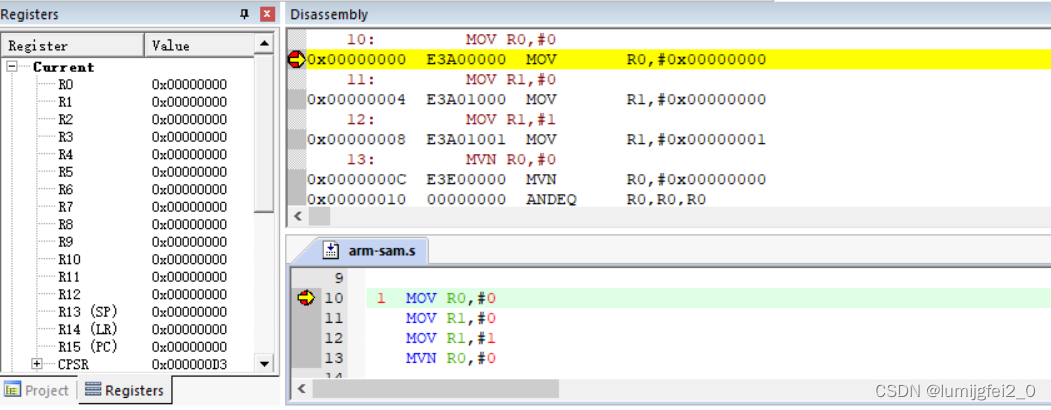
MOV RO,#0x12 @生成E3A00012的机器码
MOV RO,#0x12345678 这条指令占32位,#0x12345678是指令的一部分。#0x12345678表示是16进制的数,4个字节了已经。
MOV RO,#0xFFFFFFFF @编译成功
编译器替换成效果相同的指令了,取反了 MVN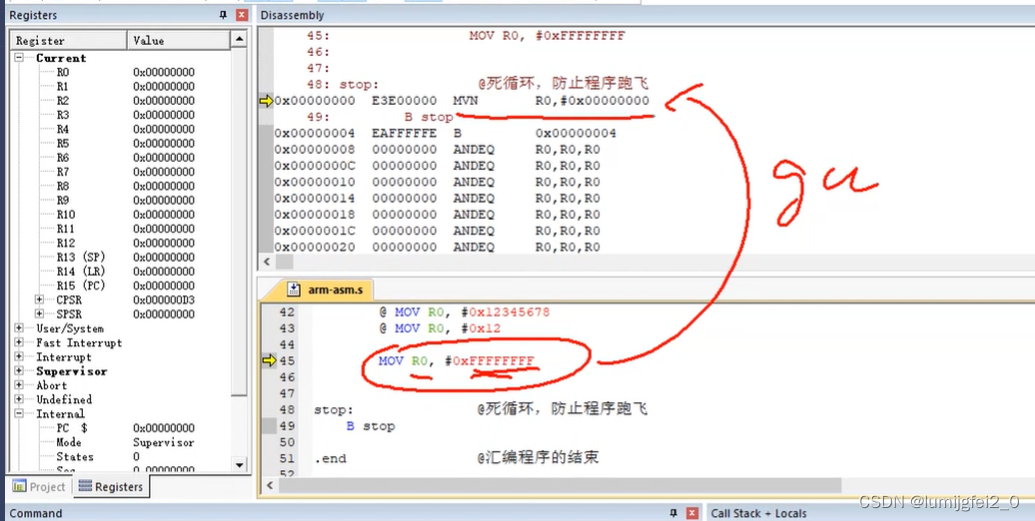
数据运算指令的格式:
操作码 : 指示执行哪种运算
目标寄存器: 存储运算结果
第一操作寄存器: 存储第一个参与运算的数据(只能是寄存器)
第二操作数: 第二个参与运算的数据(可以是寄存器或立即数)
1.3加法指令
@加法指令
MOV R2,#3
MOV R3,#2
ADD R1,R2,R3
@ R1 = R2 + R3
ADD R1,R2,#5
@R1 = R2 + 5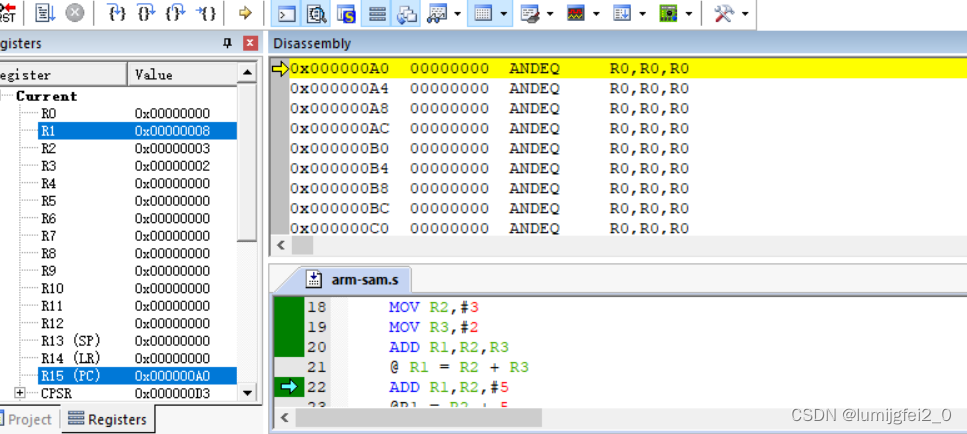
1.4减法指令
@减法指令
SUB R1,R2,R3
@R1 = R2 - R3
SUB R1,R2,#5
@R1 = R2 - 5
@只能寄存器-寄存器或者寄存器-数值,
@逆向减法指令
RSB R1,R2,#3
@R1 = 3-R2,为了数值-寄存器1.5乘法指令
@乘法指令
MUL R1,R2,R3
@R1 = R2 * R3
@乘法指令只能是两个寄存器相乘ARM不支持除法,
下面的就是8/2,1000右移一位得到100,即4
1.6位运算
@ 按位与指令
@ AND R1, R2, R3 @R1 = R2 & R3
@ 按位或指令
@ ORR R1, R2, R3 @R1 = R2 | R3
@ 按位异或指令
@ EOR R1, R2, R3 @R1 = R2 ^ R3
@ 左移指令
@ MOV R2, #0xF0
@ MOV R3, #0x2
@ LSL R1, R2, R3 @R1 = (R2 << R3)
@ 右移指令
@ MOV R2, #0xF0
@ MOV R3, #0x2
@ LSR R1, R2, R3 @R1 = (R2 >> R3)
@ 位清零指令
@ MOV R2, #0xFF
@ BIC R1, R2, #0x0F
@ 第二操作位的哪一位数为1,就将第一操作寄存器的中哪一位清零,然后将结果写入目标寄存器
1.7 格式扩展
按照指令格式来分析
@ 格式扩展
@ MOV R2, #3
@ MOV R1, R2, LSL #1 @R1 = (R2 << 1)
@ 数据运算指令对条件位(N/Z/C/V)的影响
@ 默认情况下数据运算不会对条件位产生影响,当在指令后加后缀"s"可以影响
@ MOV R1, #3
@ SUB R2, R1, #5 @无影响
@ SUBS R2, R1, #5 @有影响(产生负数,N变为1)
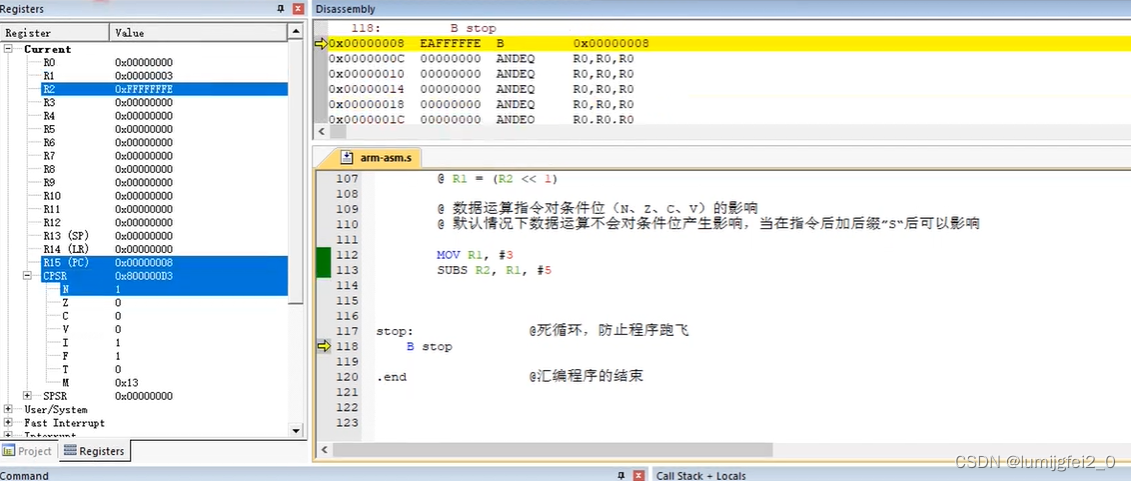
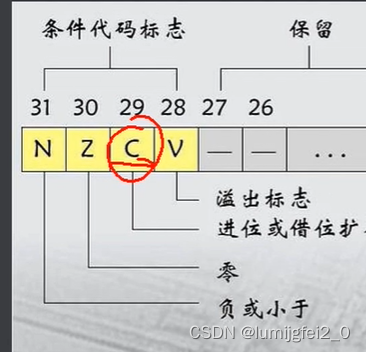
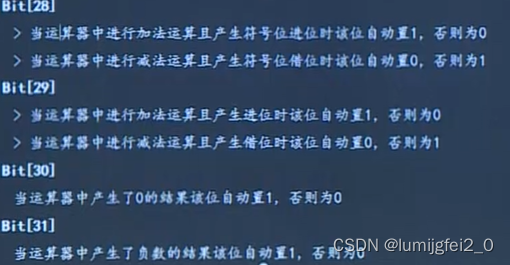
CPSR寄存器
1.8 超出位数的数据做加减法
@ 两个64位的数据做加法运算
@ 第一个数的低32位放在R1
@ 第一个数的高32位放在R2
@ 第二个数的低32位放在R3
@ 第二个数的高32位放在R4
@ 运算结果的低32位放在R5
@ 运算结果的高32位放在R6
@ 带进位的加法运算
@ 第一个数 0x00000001 FFFFFFFF
@ 第二个数 0x00000002 00000005
@ MOV R1, #0xFFFFFFFF
@ MOV R2, #0x00000001
@ MOV R3, #0x00000005
@ MOV R4, #0x00000002
@ ADDS R5, R1, R3 @低位加法要加s ADDS
@ ADC R6, R2, R4 @将CPSR中的C位(0或1)也加了进去 R6 = R2 + R4 + 'C'@ 带借位的减法指令
@ 第一个数 0x00000002 00000001
@ 第二个数 0x00000001 00000005
MOV R1, #0x00000001
MOV R2, #0x00000002
MOV R3, #0x00000005
MOV R4, #0x00000001
SUBS R5, R1, R3
SBC R6, R2, R4 @将CPSR中的C位取反(1或0)也减了进去 R6 = R2 - R4 - '!C'

















 5723
5723

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









