




目录
一、PWM简介
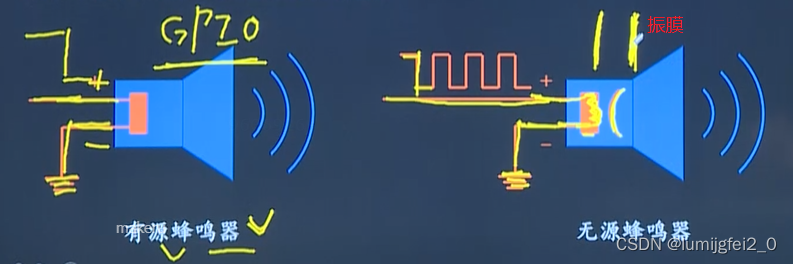
蜂鸣器工作原理
蜂鸣器
-
有源蜂鸣器只要接上额定电源就可以发出声音 (GPIO控制)
-
无源蜂鸣器利用电磁感应原理,为音圈接入交变电流后形成的电磁铁与永磁铁相吸或相斥而推动振膜(20-20000HZ可被人耳接收)发声(PWM控制)
无源蜂鸣器的控制方式:
1.GPIO控制
CPU会陷入到Delay中,浪费CPU资源,方法不好用
while(1)
{
GPX2.DAT=GPX2.DAT | (1 << 7);
Delay(1000000);
GPX2.DAT=GPX2.DAT & (~(1 << 7)); c
Delay(1000000);
}
2.PWM控制
PWM 即脉冲宽度调制,通过对脉冲的宽度进行调制
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 397
397

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









