 加速度传感器助力救援机器人越障
加速度传感器助力救援机器人越障




带障碍物的自主救援机器人行驶性能基础研究
摘要
我们开发了一种搜救机器人,用于在地震灾害后于建筑物中寻找人员。在这种环境中,可能存在斜坡、楼梯和瓦砾等障碍物;然而,由于无线通信系统的影响,遥控系统在获取图像时可能会出现延迟,这使得操控机器人变得困难。特别是攀爬斜坡和楼梯尤为困难。本文中,我们使用加速度传感器来实现斜坡和楼梯的自动越障,并描述了该方法的实验结果。
I. 引言
2014年5月,我们使用明星救援Mk‐3遥控机器人参加了“2014年日本机器人杯公开赛—救援机器人联赛”[1]。图1显示了2014年比赛中的地形。遥控救援机器人被用于地震后搜寻人员。与人工相比,使用遥控搜救机器人可以减少地震灾害中的伤亡人数。然而,地震后受损建筑的室内环境存在斜坡和楼梯等障碍,对机器人越障构成挑战。当操作员通过摄像头获取视觉反馈来控制机器人时,由于图像获取的延迟,操控会变得困难。因此,实现斜坡和楼梯的自动越障是可取的;但截至目前,这一技术尚未实际应用[2‐4]。本文描述了障碍物的自动识别与越障方法。

II. 救援机器人概述
A. 明成救援Mk-4的配置
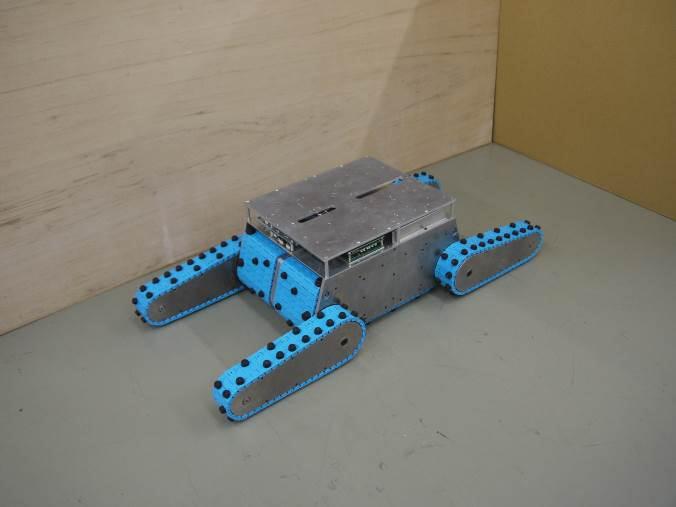
图2显示了明生救援Mk‐4机器人的照片,表I列出了该机器人的规格。明成救援Mk‐4是一种由机身和四条腿组成的履带式机器人。机身的重量由腿部支撑,以实现越障功能。
表I. 明生救援Mk‐4机器人规格
| 规格 |
| — |
| 尺寸(重量):宽 416 × 长 864 × 高 240 毫米 (35千克) |
| 伺服电机:RE40,150瓦,156:1 和 43:1 齿轮比,512脉冲/转 编码器,maxon电机 |
| 伺服放大器:TITechSH2微型控制器:CPU SH7047F,HiBot 1XH电源模块:5‐60V 60A,HiBot TITechSH2通用串行编程器,HiBot |
B. 三维扫描系统
该机器人配备了一台由北阳自动株式会社制造的三维(3D)扫描激光测距传感器(Classic‐URG),用于识别障碍物,并由近藤科学株式会社的伺服电机驱动。

表II. 3D扫描系统的规格
| 规格 |
| — |
| 伺服电机:KRS‐2552RHV,1.37牛·米,312.4:1减速比,Kondo 株式会社Kagaku |
| Classic‐URG:URG‐04LX,0.02–5.6 米,240° ,HOKUYO AUTOMATIC公司, L. |
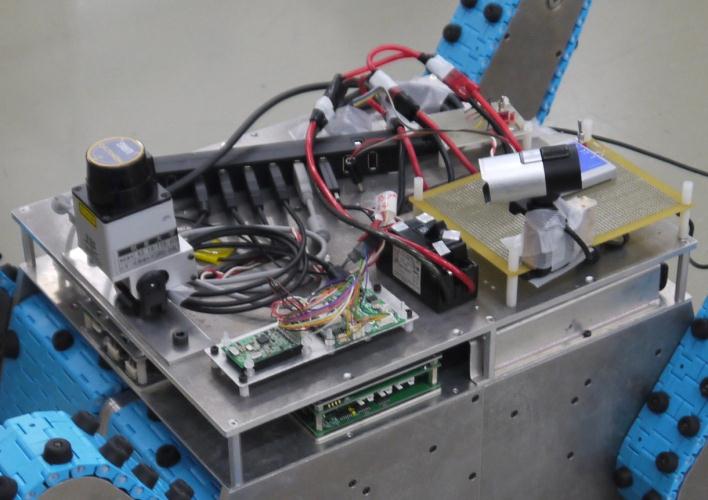
我们将3D扫描系统放置在机器人前方,如图3所示。表II列出了该扫描系统的规格,该系统可通过伺服电机在 Y轴上旋转‐30°至+70°。
图4展示了从二维到三维的坐标转换。该转换由以下方程定义。
$$
\begin{aligned}
&\theta = \frac{\pi}{2} - \frac{\theta_S}{2} \
&L’ = L_S + \phi \
&S’ = S_L - \phi
\end{aligned}
$$

C. 惯性测量单元的配置
图5显示了由HiBot制造的惯性测量单元(IMU)。该IMU被安装在明成救援Mk‐4上。表III列出了IMU的主要规格。为了实现自动化,我们使用了三轴加速度传感器。
表III. IMU规格
| 规格 |
| — |
| ・Hibot姿态传感器,
・X,Y,Z加速度传感器(1.5,2,4,6g)
・横滚角、俯仰角(±300°/s),偏航角(±100°/s) 陀螺仪传感器(±300°/s)
・X,Y,Z磁力计传感器(±0.2毫特斯拉),HiBot |
D. 软件配置
我们在安装于机器人上的笔记本电脑中使用 Ubuntu 12.04 LTS作为操作系统,采用C++编程语言配合GNU编译器套件以及Classic‐URG实现自主控制。当机体即将与墙体接触时,会编程使其避开。测量数据存储在日志文件中,包含来自扫描测距仪URG‐04LX(Classic‐URG)和惯性测量单元的距离数据。使用 GNUPLOT实时显示地图数据。
III. 使用3D扫描系统识别障碍物
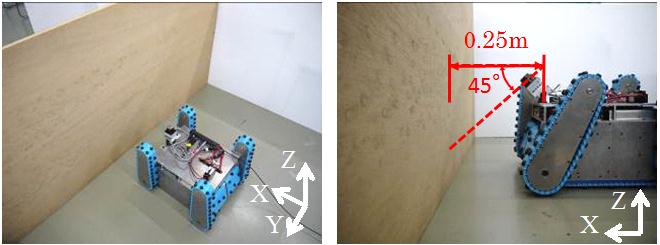
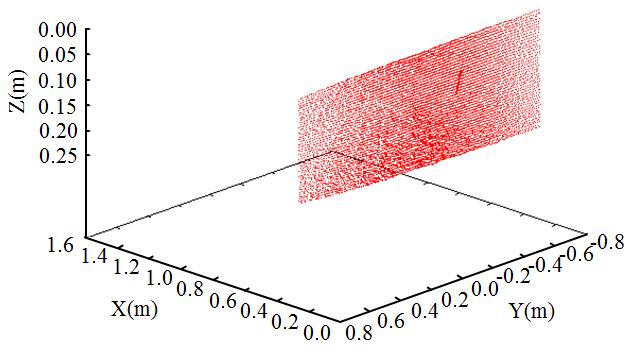
使用3D扫描系统,我们进行了实验以确定是否可以在图6所示环境中的任意位置准确获取数据。图7显示了相应环境的三维图,表明墙体距离机器人 0.25米。
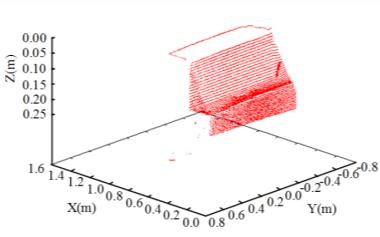
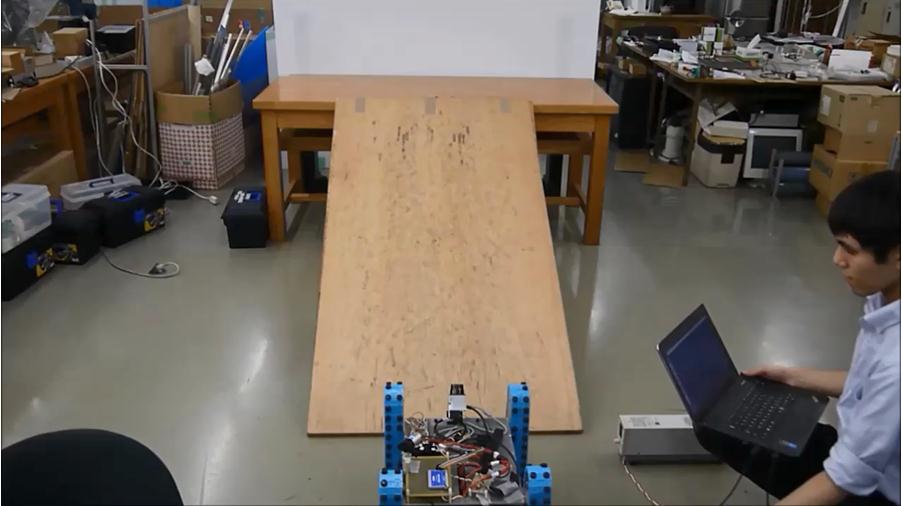
实验地形包含一个25°坡度,如图8所示。三维扫描测量显示,相对于Y轴的角度为45° 。到坡边的距离为0.25米。
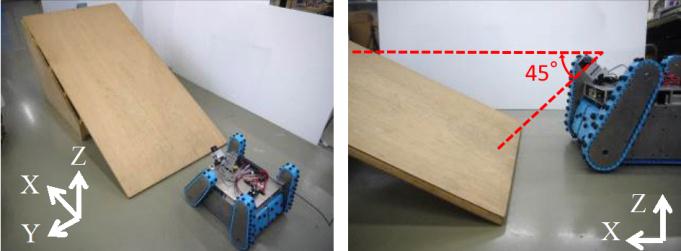
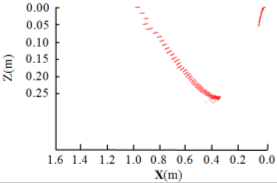
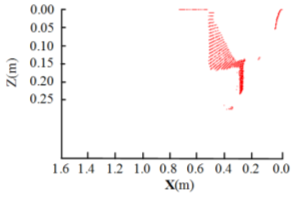
图9显示了相应扫描图像数据的三维图;到坡面的距离约为0.30米,在x‐z平面上的坡度角为25°。
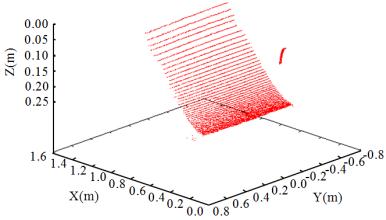
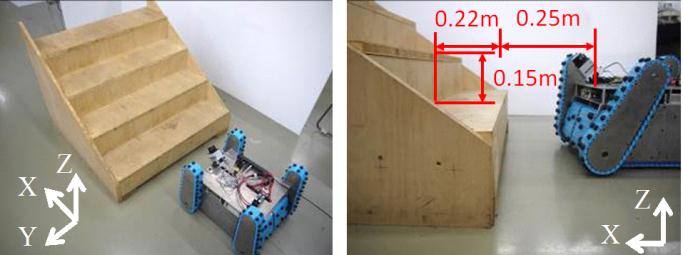
图10显示了包含一段楼梯的地形照片。从图11所示的扫描三维图中可以看出,楼梯的距离为0.25米,楼梯的宽度为0.25米,高度为0.15米。
从这些数据中,我们可以得出结论:三维扫描系统使机器人能够获取识别障碍物所需的详细信息。
IV. 使用加速度传感器的自动坡度通过
A. 无加速度传感器反馈的实验结果
为了在没有加速度传感器反馈的情况下通过25°斜坡,进行了实验。为了研究坡度摩擦系数的影响,我们调查了木质和地毯表面的各种组合,如图12所示。我们使用左右伺服电机的编码器值来确定机器人的里程计,如图13所示。在所有三种情况下,当机器人向前移动时,机器人都向左弯曲。在所有情况下,我们都必须在机器人从斜坡上掉落之前停止电机。
为了规避障碍物,定义了一个坐标系,如图14所示。来自加速度传感器的X、Y、Z轴值分别定义为 $a_x$、$a_y$ 和 $a_z$。滚转角 $\theta_x$ 由以下公式给出:
$$
\theta_x = \tan^{-1}\left(\frac{a_x}{\sqrt{a_y^2 + a_z^2}}\right)
\quad (3)
$$
俯仰角 $\theta_y$ 是通过以下方式获得的:
$$
\theta_y = \tan^{-1}\left(\frac{a_y}{\sqrt{a_x^2 + a_z^2}}\right)
\quad (4)
$$
机器人 $\theta_z^*$ 的目标角度计算如下:
$$
\theta_z^* = \tan^{-1}\left(\frac{a_y}{a_z}\right)
\quad (5)
$$
未使用加速度传感器反馈计算的角度如图15–17所示。俯仰角 $\theta_y$ 与坡度角相同(即25°)。类似地,横滚角 $\theta_x$ 和目标角 $\theta_z^*$ 与0°存在显著偏差。

 所示表面(即仅胶合板)的加速度传感器数据分析)
所示表面(即仅胶合板)的加速度传感器数据分析)
 所示(即胶合板和地毯))
所示(即胶合板和地毯))
 所示表面(即交替的胶合板和地毯)进行加速度传感器数据分析)
所示表面(即交替的胶合板和地毯)进行加速度传感器数据分析)
B. 坡度加速度传感器反馈的实验结果
要通过坡度或楼梯,需要知道坡度的方向和梯度。我们使用目标角度 $\theta_z^*$ 进行了计算,公式(5)。带加速度传感器反馈的越障算法如图18所示。
自动坡道通过测试所用环境如图19所示。
图20–22展示了使用加速度传感器反馈时机器人在25°坡度上的轨迹。目标角度 $\theta_z^*$ 和横滚角 $\theta_x$ 被控制在约0°范围内。
 所示表面(即仅胶合板)的加速度传感器反馈的加速度传感器数据分析)
所示表面(即仅胶合板)的加速度传感器反馈的加速度传感器数据分析)
 所示表面(即胶合板和地毯)的加速度传感器数据通过传感器反馈进行分析)
所示表面(即胶合板和地毯)的加速度传感器数据通过传感器反馈进行分析)
 所示表面(即交替的胶合板和地毯)进行加速度传感器数据分析及传感器反馈)
所示表面(即交替的胶合板和地毯)进行加速度传感器数据分析及传感器反馈)
带加速度传感器反馈的里程计数据如图23所示。所有三条带有加速度传感器反馈的轨迹在通过坡度时均实现了近乎直线路径。
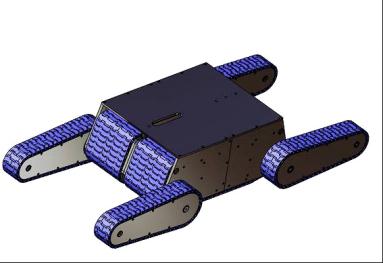
图24显示了在通过仅胶合板坡道时偏航轴的陀螺仪测量值。控制偏航轴并使机器人旋转方向。然后,可以观察到,在 IMU 控制情况下,机器人的偏航轴角速度数据比无IMU控制情况下的数据更大。
C. 楼梯通过中无加速度传感器反馈的实验结果
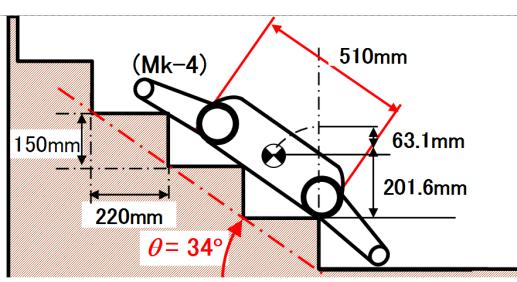
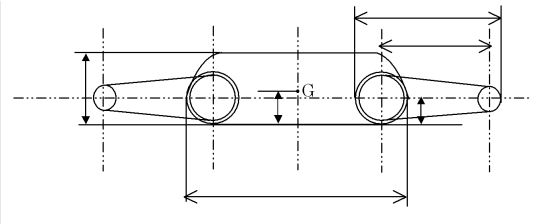
此处,我们研究自动楼梯通过。如果操作员根据图像数据操控机器人,由于通信延迟,存在跌落的风险。图25显示了明成救援Mk‐4机器人的尺寸。
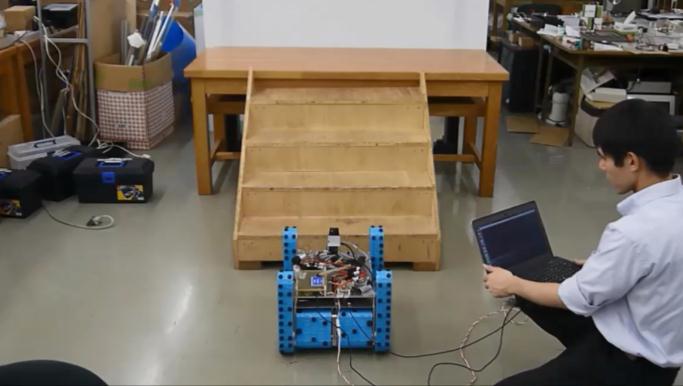
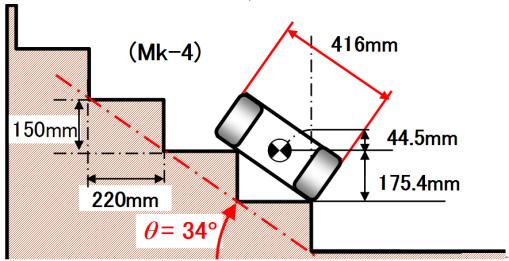
图26显示了明生救援Mk‐4机器人归一化能量(NE)稳定裕度 [5] 计算的结果(注意,NE稳定裕度数值越大越稳定)。当机器人相对于楼梯旋转90°时,NE稳定裕度从 63.1毫米下降到44.5毫米,对应跌落风险增加。

使用加速度传感器反馈控制进行自动楼梯通过的环境如图27所示。爬楼梯实验的结果如图28和图29所示。目标角度 $\theta_z^*$ 和横滚角度 $\theta_x$ 被控制在约0° 以内。
带加速度传感器反馈的里程计数据如图30所示。机器人在爬楼梯过程中的轨迹几乎呈直线。
图31显示了楼梯通过过程中偏航轴的陀螺仪测量结果。与斜坡实验情况相同,我们可以观察到,相比无IMU控制情况,IMU控制情况下的机器人偏航轴角速度数据更大。
表IV. 救援机器人的归一化能量稳定裕度
| 情况 | 救援机器人的NE稳定裕度 明成救援Mk‐4 |
| — | — |
| 直线上升情况 | 63.1毫米 |
| z = 90° 倾斜上升情况 | 44.5毫米 |
V. 结论
我们描述了一种利用3D扫描系统实现机器人障碍物识别与越障的自动化系统。我们介绍了通过加速度传感器反馈实现自动攀爬控制的实验。作为未来工作的一部分,我们计划在更真实的环境中进行实际演示。

















 47
47

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









